橄榄种植存在诸多严重危险,例如从梯子上坠落、拖拉机翻车以及接触植保产品。在过程模拟领域,这些变量在虚拟环境中被建模,以预测事故。数字化重现斜坡上的采收或振动器的操作,可以分析坠落运动学和化学品的扩散,为重新设计安全协议提供精确数据,而无需让操作员暴露在危险中。
危险建模与虚拟人体工程学 🛠️
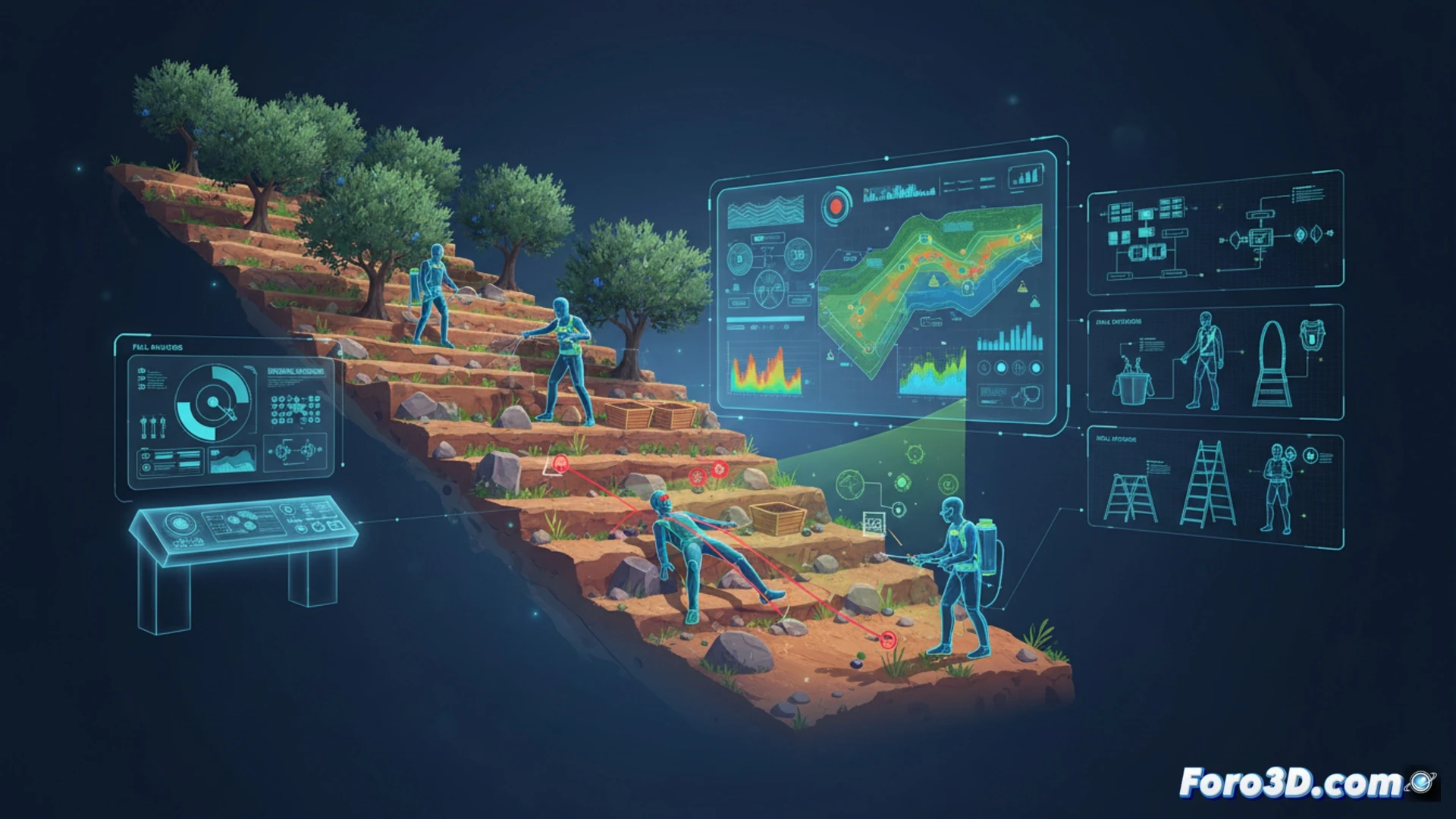
3D模拟将橄榄种植者的每项任务分解为可测量的变量。例如,在模拟使用带振动器的拖拉机时,通过生物力学化身计算不平坦地形上的翻车角度和操作员的结构性疲劳。对于修剪或人工采收,模拟树枝坠落轨迹以及坡度超过15%时的关节压力。这种分析允许调整梯子位置或安全带设计,从而降低腰背痛和撞击的风险。此外,通过虚拟粒子可视化化学暴露,优化重新进入田地的必要时间和通风条件。
沉浸式培训,实现真实预防 🎯
除了分析之外,过程模拟还允许在橄榄园的数字化孪生中培训橄榄种植者。工人在虚拟斜坡上练习安全驾驶拖拉机,并学习识别疲劳信号,而无需承担真实后果。这种方法将理论转化为实践经验,降低了事故率。投资这些模型不仅能挽救生命,还能通过减少事故停工和改善每次采收的人体工程学来优化生产。
3D模拟如何能够真实地再现橄榄种植中的风险因素,例如梯子在不平坦地面上的稳定性或不同风力条件下植保产品的漂移,从而在不将工人暴露于真实危险的情况下进行培训?
(附注:模拟工业过程就像看蚂蚁在迷宫里爬,但更贵。)