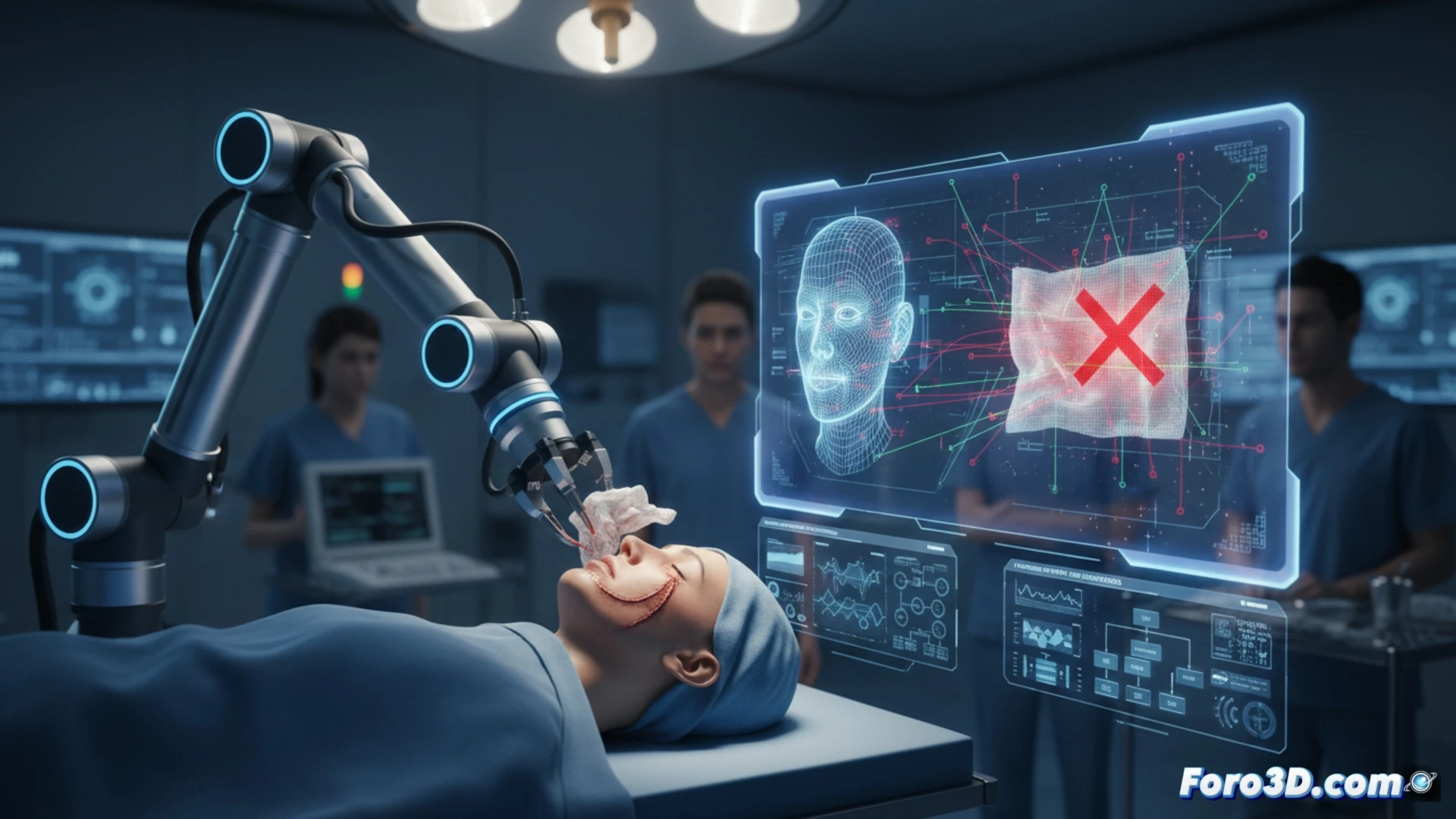
一款设计用于辅助皮肤科手术的协作机器人在患者身上意外造成了一道深度切口。通过对力传感器进行3D重建和患者点云映射的事故法医分析,揭示了一个关键异常:该协作机器人将手术纱布误认为是皮肤表面。此案例凸显了医疗环境中触觉感知的风险。
错误重建:数字孪生与点云 🛠️
利用RoboGuide进行运动学仿真,并使用Unreal Engine 5构建数字孪生,重现了手术场景。将扭矩传感器数据集成到数字孪生中,使得规划轨迹的偏差得以可视化。在CloudCompare中对事故后点云的分析显示,患者表面存在不连续性。算法比较揭示,纱布的机械阻抗(存储在机器人数据库中标记为软组织)产生了虚假接触读数,从而触发了切割动作。
3D仿真作为应对传感器故障的护盾 🛡️
此事件表明,3D仿真不仅是设计工具,更是关键的安全审核手段。将实时点云数据集成到数字孪生中,使得识别材料混淆(纱布与表皮)成为可能。对于手术自动化而言,挑战不仅在于机械臂的精度,更在于感知算法区分非刚性物体的能力。教训很明确:我们必须训练协作机器人对其触觉产生怀疑。
协作机器人行业如何集成冗余触觉反馈系统,以避免在美容手术等精密医疗应用中因触觉故障而危及安全?
(附注:模拟机器人很有趣,直到它们决定不听从你的指令。)