在日照强烈的时段,一台自主行李管理机器人在机场航站楼撞倒了一名乘客。法医调查的重点是重建机器人立体相机系统的视野,以确定抛光地板上的太阳反射是否产生了深度误差区域。此案代表了3D技术在自主系统事故分析应用中的一个里程碑,其中视觉感知因极端环境条件而失效。
法医工作流程:摄影测量、LiDAR和Unreal Engine 5模拟 🛠️
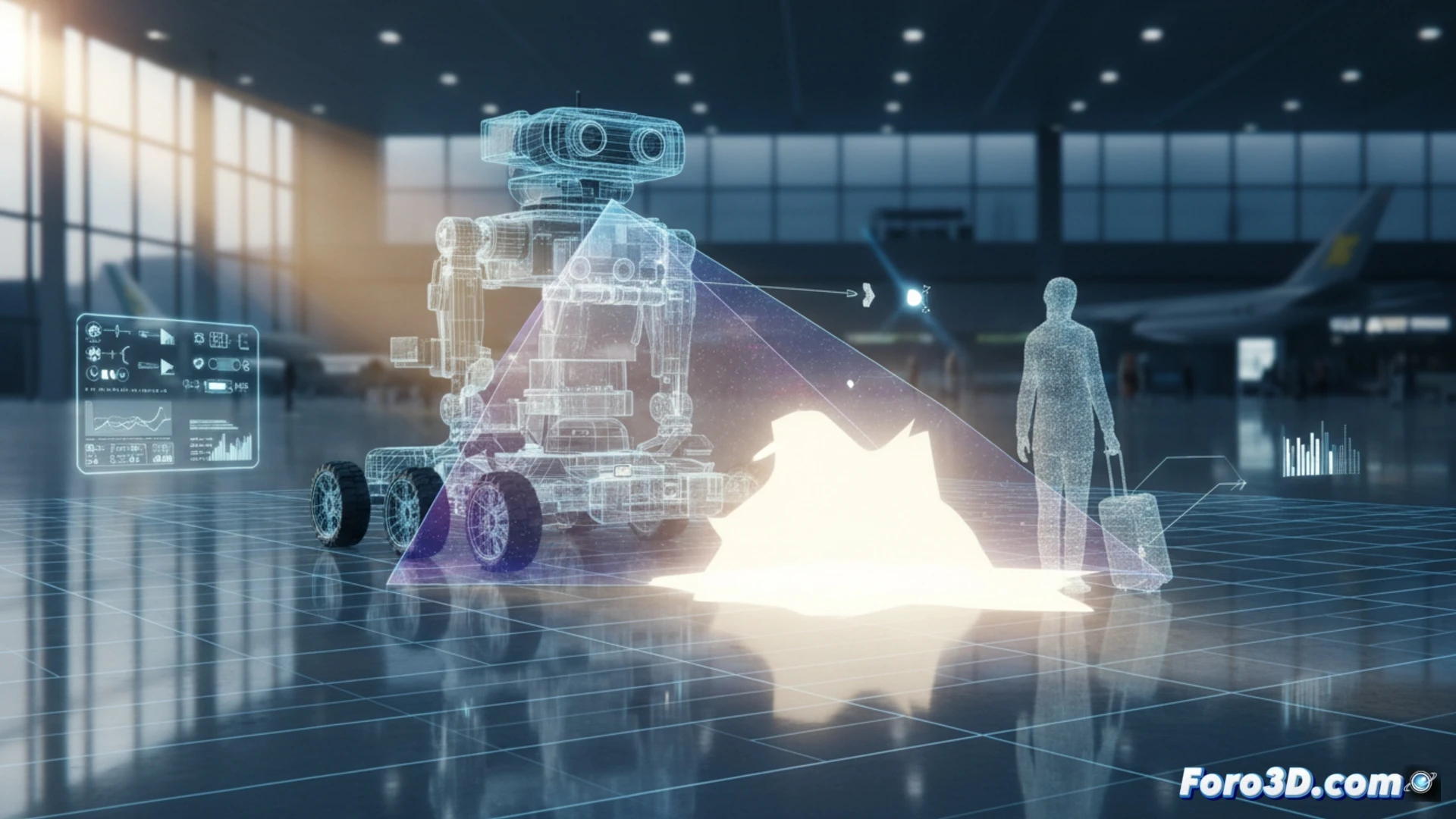
过程始于通过LiDAR扫描和RealityCapture摄影测量对事故区域进行数据采集,生成地面和撞击区域的高密度点云。在CloudCompare中,将环境数据与机器人的CAD模型对齐,以重建事故发生时其传感器的精确位置。然后,在Unreal Engine 5中模拟立体视觉场,对地面应用反射材质并配置真实太阳光照。模拟证实,反射在特定区域产生了亮度梯度,使像素饱和,消除了双目视差,并在乘客所在位置形成了一个直径为40厘米的光学盲点。
自主机器人传感器设计的教训 🤖
此次鉴定表明,立体视觉系统虽然在受控条件下表现稳健,但易受镜面表面和极端光照变化的影响。所应用的方法结合了摄影测量、点云对齐和传感器模拟,为未来自主机器人事故建立了一个可重复的法医流程。太阳反射假设的验证迫使制造商引入冗余传感器,如飞行时间LiDAR,以减轻机场环境中的这些光学盲点。
法医3D重建如何识别投影阴影对自主机器人路径的视觉遮挡影响,在机场事故中发挥作用?
(附注:在法医流程中,最重要的是不要将证据与参考模型混淆……否则你会在场景中留下一个幽灵。)