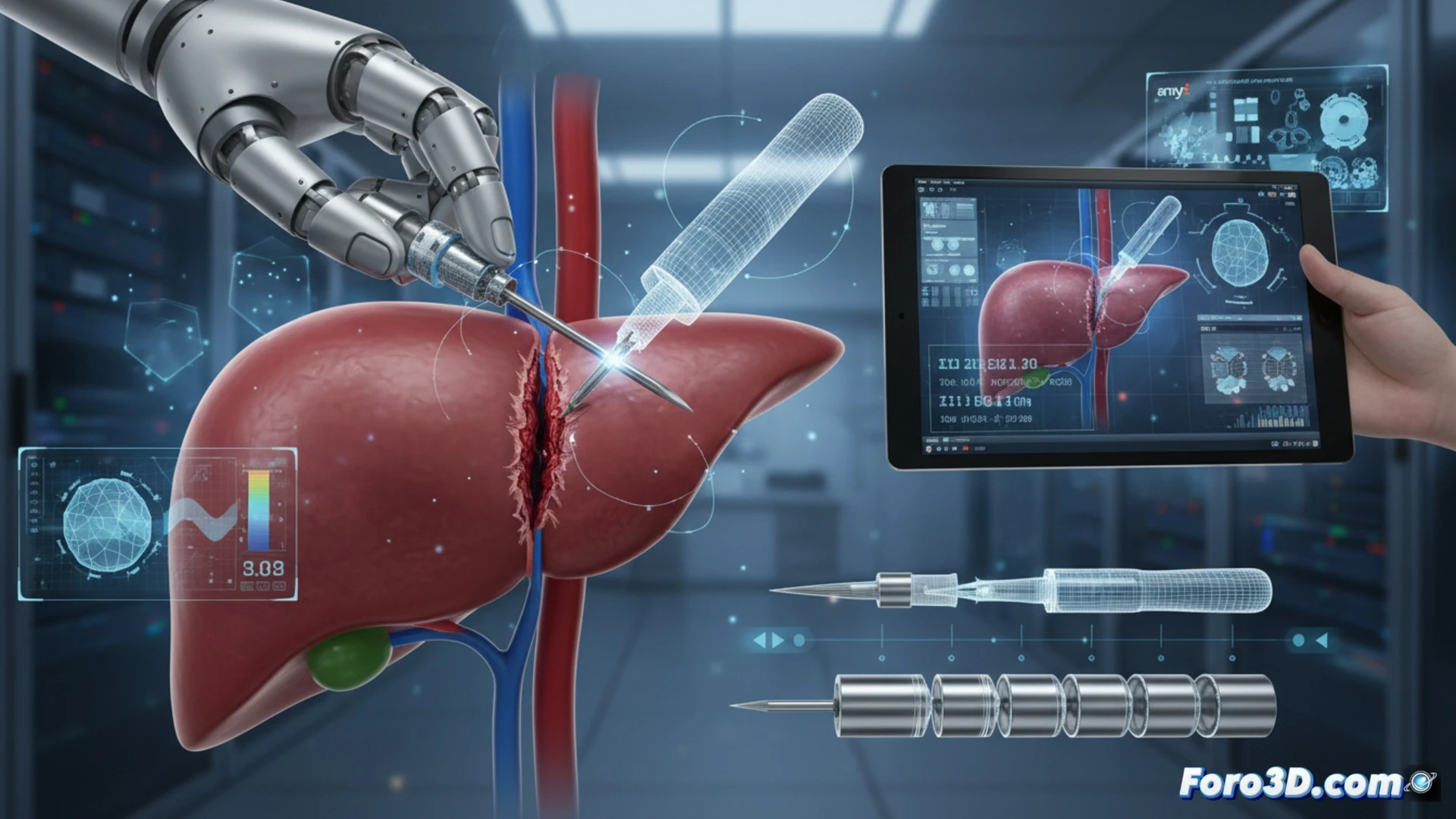
一台设计用于高精度肝脏活检的自主手术机器人,在手术过程中造成血管撕裂。该事件最初被归因于软件错误,随后接受了3D法医鉴定。调查结合了Ansys中的有限元模拟和针具的度量扫描,以重建故障动态,证明根本原因并非算法问题,而是机械和组织层面的问题。
有限元模拟与针具扫描 🧬
法医团队通过3D扫描数字化了针具的精确几何形状,并将其集成到Ansys的有限元模型中。模拟再现了肝实质的各向异性,其特征是具有方向性刚度变化的胶原纤维。模拟表明,当穿过纤维密度高的肝叶时,针尖承受了不对称的弯曲力矩。这种扭矩未被机器人的刚性引导算法考虑,导致轨迹偏移了4.2毫米,足以切断邻近的门静脉血管。
自主手术机器人的教训 🤖
鉴定表明,当前的控制模型低估了活体组织的生物力学交互。为避免未来的医源性损伤,自主导航算法必须纳入通过术前弹性成像或实时模拟获得的组织各向异性数据。集成肝脏数字孪生(如Materialise Mimics生成的模型)将能够动态调整插入力和角度,弥合模型理论刚度与器官实际复杂性之间的差距。
从这次肝脏针具故障的3D鉴定中,可以提取哪些关于自主手术机器人反馈传感器设计的教训,以防止未来的血管撕裂?
(附注:如果打印的器官不跳动,你总是可以给它加个小马达……开个玩笑!)