特斯拉的新型人形机器人Optimus Gen 2不仅是机械工程的杰作,更是3D仿真软件的胜利。为了让一台重达63公斤的机器流畅行走并拿起鸡蛋而不捏碎,特斯拉不得不在虚拟环境中重建每一个关节和传感器。这个数字孪生体通过反复试错训练机器人AI,使物理模型能够继承流畅的动作,而无需冒险使用真实组件。
生物力学建模与触觉传感器仿真 🤖
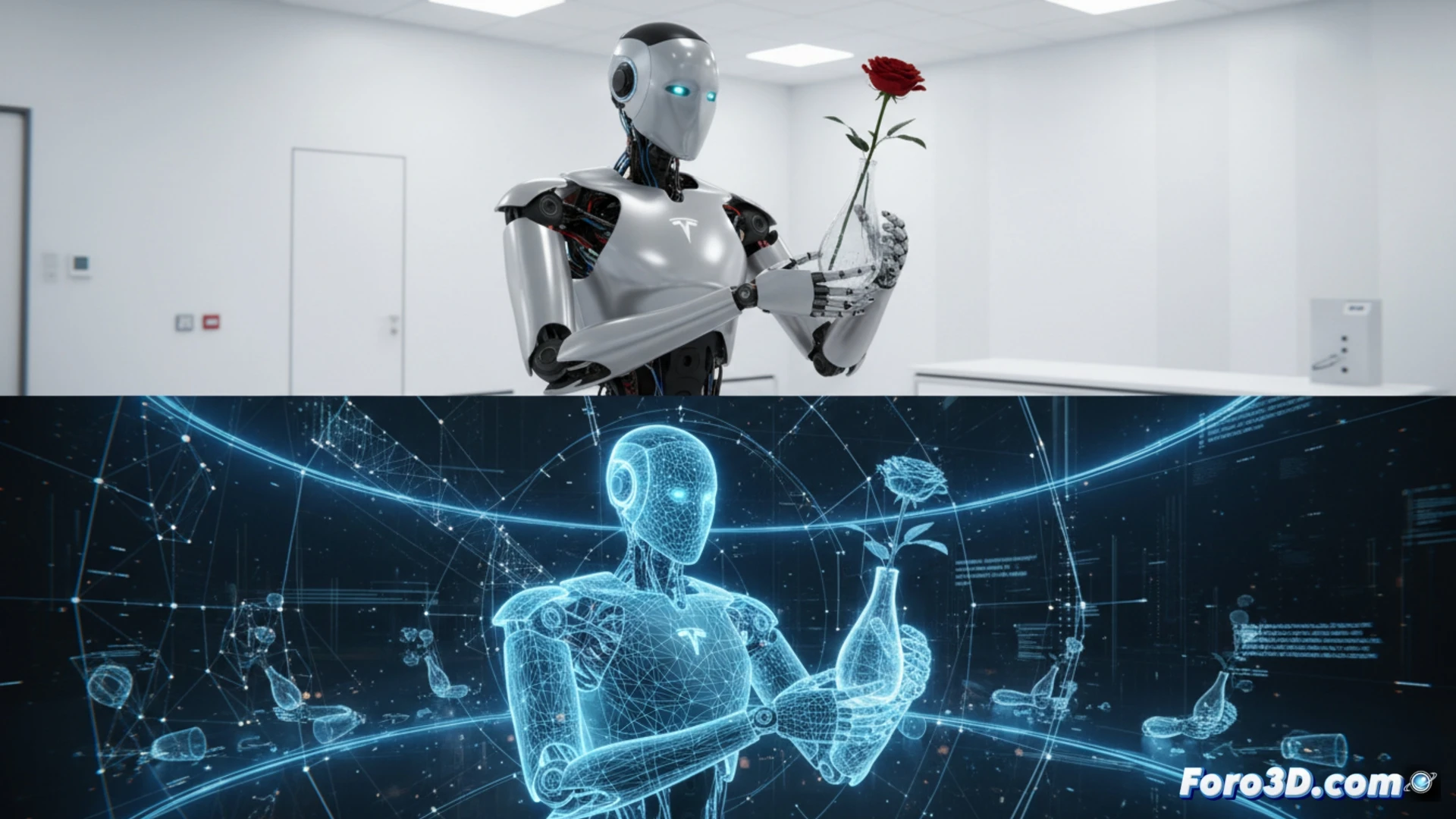
Gen 2的质的飞跃在于其生物力学控制。为此,工程师们构建了一个机器人的3D模型,复制了其质心和每个段的惯性。在这个模型上,执行逆物理仿真以预测平衡轨迹。关键在于虚拟触觉传感器:在3D环境中,模拟了按压物体时垫片的变形。AI学习读取这些合成数据以调整抓取力,将数字信号转化为近乎人类的触觉。
3D可视化:通往自主性的捷径 🚀
通过3D可视化验证,特斯拉能够比使用物理原型更快地迭代。通过在渲染环境中模拟跌倒和姿势修正,控制软件在无机械磨损的情况下成熟。这不仅加速了开发,还重新定义了自动化:机器人不再是僵化的执行者,而是一个理解自身3D身体的系统。下一步将是让数字孪生体自主学习在整座工厂中导航,然后Optimus才迈出它的第一步。
数字孪生体的使用如何让Optimus Gen 2在不损坏易碎物体的情况下执行精密任务?这种仿真相比传统机器人训练方法有哪些优势?
(附注:仿真机器人很有趣,直到它们决定不听从你的指令。)