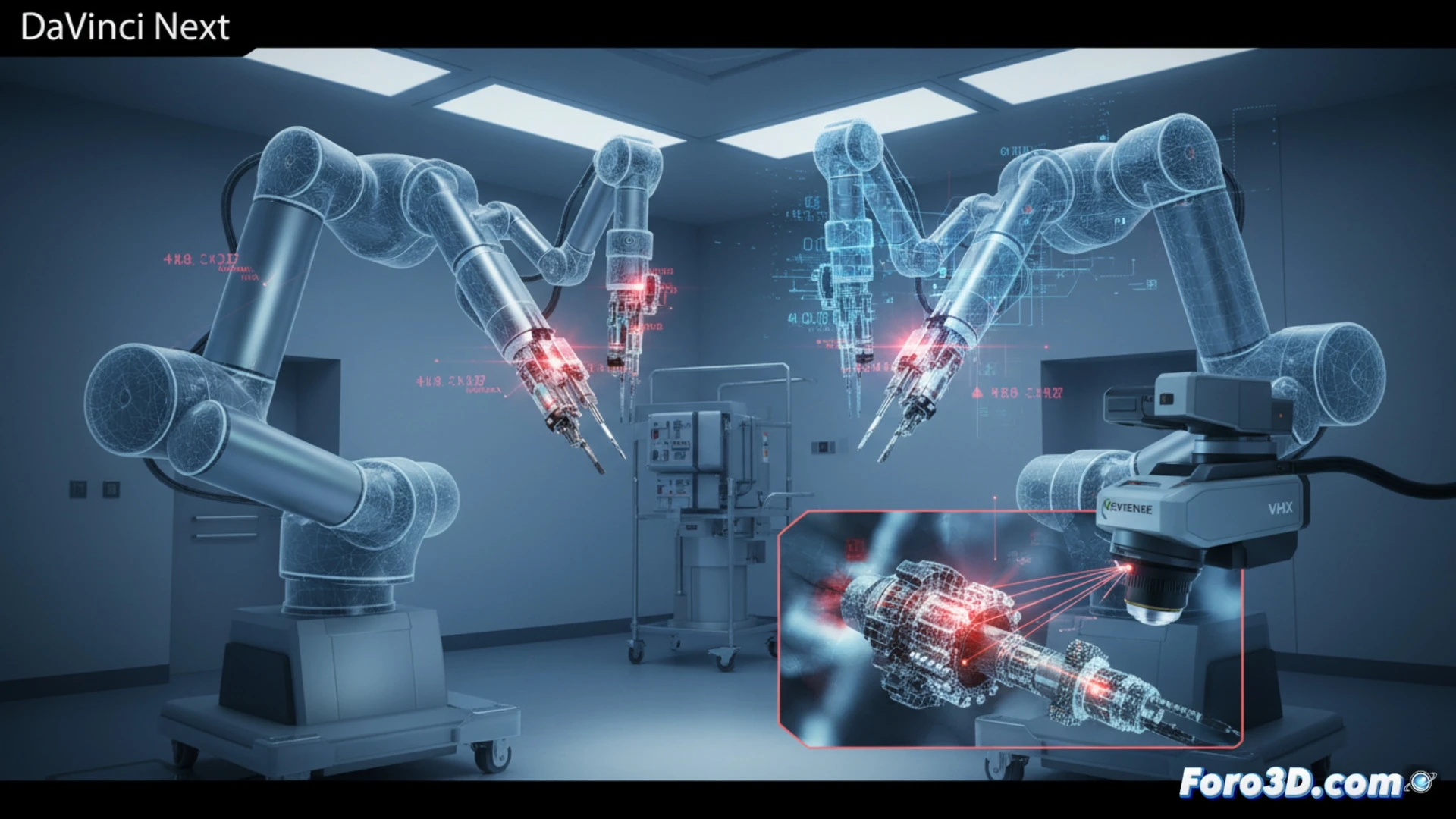
在达芬奇Next系统辅助的一次手术中,一个机械臂执行了非指令动作,危及了手术安全。该事件触发了一项深入的取证分析,结合了RoboGuide仿真、机器人数字孪生研究以及通过基恩士VHX 3D显微镜对微型伺服电机进行的检查,揭示了标准诊断软件无法检测到的早期故障。
使用RoboGuide和MATLAB重建非指令动作 🤖
工程团队将机器人的遥测日志加载到MATLAB中,以识别确切的指令序列和偏差。在3号机械臂的一个微型伺服电机中检测到异常的电流峰值。为了可视化故障的运动学,将数字孪生模型导入RoboGuide,重现了非预期的轨迹。仿真证实,角度偏差与伺服电机行星齿轮上的微裂纹相符,该裂纹仅在基恩士VHX 3D显微镜下以500倍放大倍数可见,其中材料疲劳磨损的痕迹清晰可见。
对医疗自动化预测性维护的启示 🔬
此案例表明,手术机器人的可靠性不能仅依赖功能测试。将数字孪生与RoboGuide仿真及3D显微分析相结合,可以创建预测性磨损模型。通过将MATLAB日志与基恩士图像相关联,可以建立振动或电流阈值,以预测灾难性故障。对于该行业而言,这意味着采用物理与数字相结合的混合检查方法,从而提高自动化领域的安全标准。
是否有可能通过实时集成数字孪生与机械磨损显微数据,来预测达芬奇Next机械臂在手术中的故障?🏥
(附注:仿真机器人很有趣,直到它们决定不听从你的指令。)