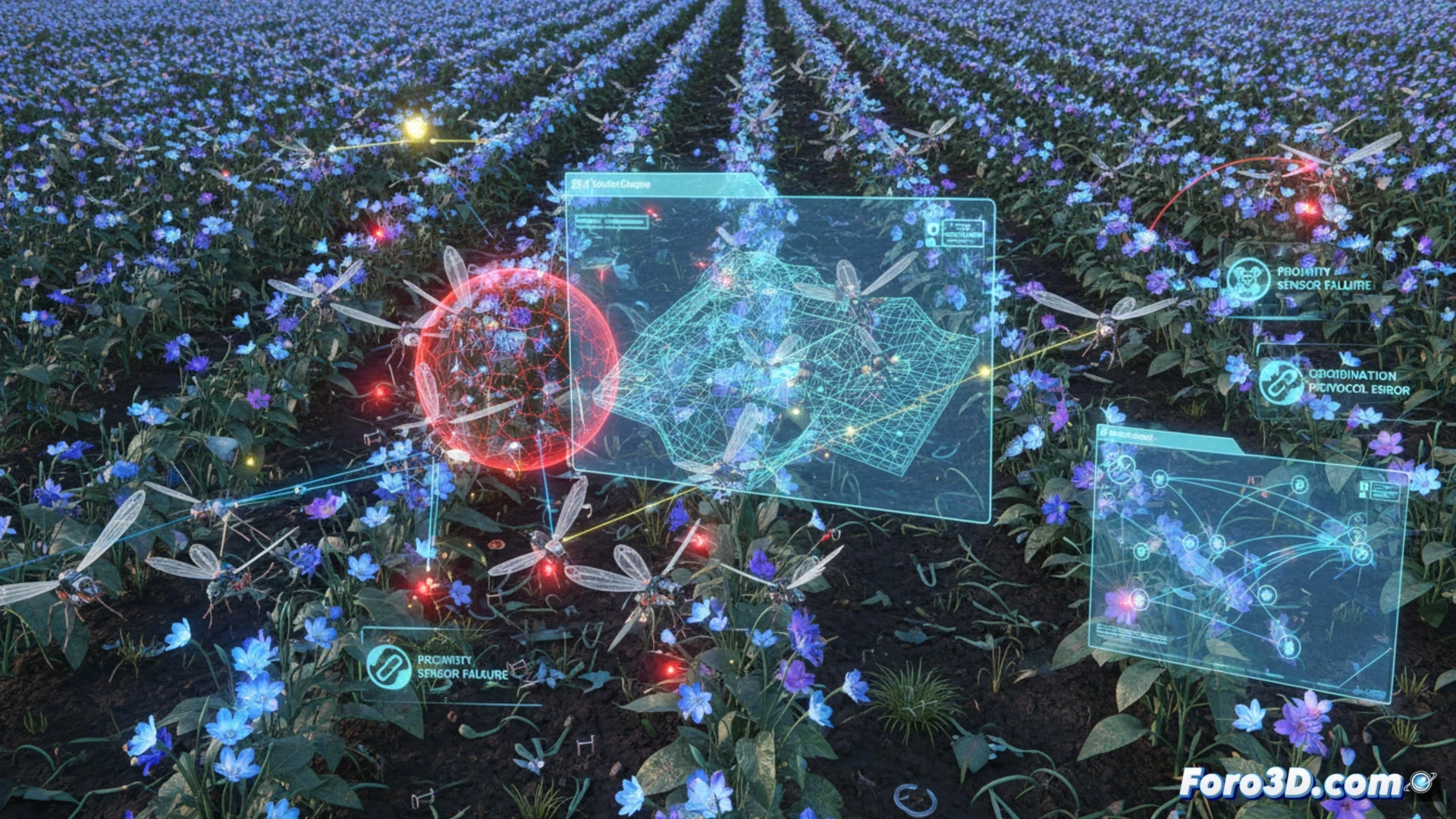
一群授粉微型无人机在发生灾难性故障后摧毁了实验性作物。使用RealityCapture和3ds Max等工具进行的3D重建,可以分析飞行轨迹和接近传感器数据。此案例暴露了集约化作物自动化中的关键漏洞,其中机器人之间的协调对于避免碰撞和确保有效授粉至关重要。
V-REP和Gazebo中的轨迹与传感器模拟 🤖
要理解故障,需要在机器人模拟环境中对蜂群行为进行建模。V-REP可以重现微型无人机的飞行物理,并编程基于超声波或LiDAR传感器的避障算法。而Gazebo则提供了更真实的环境,用于测试多个代理与作物之间的交互。在此案例中,3D重建表明,接近传感器校准错误导致蜂群失去同步,使无人机相互碰撞并与植物相撞,而非为其授粉。
农业机器人的教训 🌱
此次故障并非孤立事件,而是反映了当前农业机器人面临的挑战。为了维持蜂群的经济可行性而依赖低成本传感器,引入了故障风险。在V-REP和Gazebo中的预先模拟必须包括传感器噪声和通信丢失的场景。只有通过详细的3D分析和严格的飞行算法验证,我们才能避免下一次实验性作物变成一片废墟。
3D避碰算法在蜂群故障传播中扮演了什么角色?在虚拟事故重建中,如何对其混沌行为进行建模?
(附注:模拟机器人很有趣,直到它们决定不听从你的指令。)