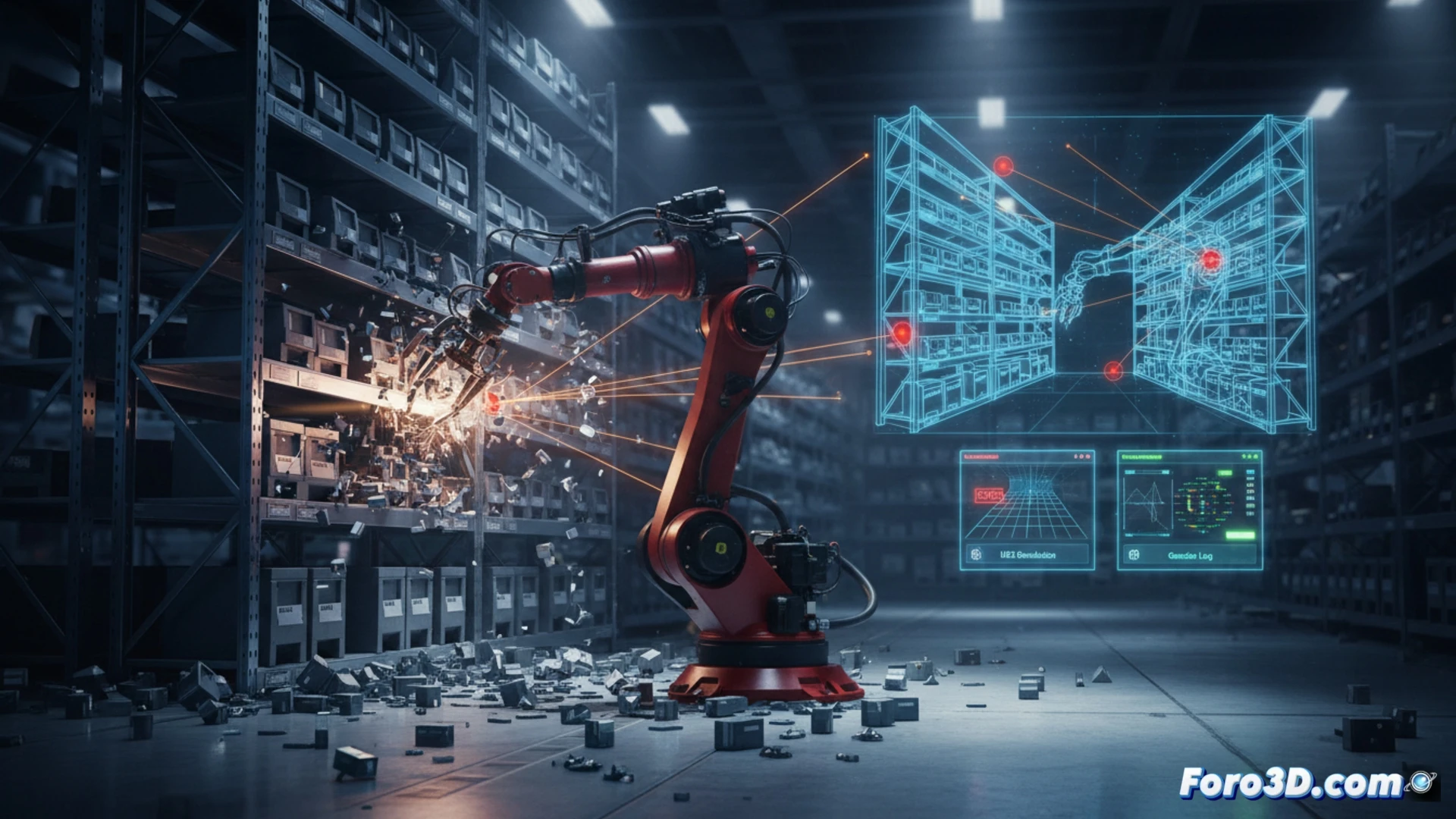
一台拣选机器人在高密度仓库中撞上货架,引发多米诺效应,导致数排货物倒塌。如果激光雷达传感器能正确检测到障碍物的接近,这起事故本可以避免。为了理解故障原因,我们通过数字孪生技术重现了事故,将FARO Scene扫描的真实数据与Gazebo中的模拟以及Unreal Engine 5中的可视化进行对比。目标是定位由走廊金属表面镜面反射产生的盲点。
使用FARO Scene进行法医重建,并在Gazebo中验证 🛠️
第一步是使用FARO Scene捕获事故后仓库的几何形状,生成高精度点云。该点云被导入Navisworks,用于分析结构倒塌的顺序。随后,在Gazebo中构建了机器人和货架的数字孪生,复制了原始的拣选轨迹。通过在这个虚拟环境中模拟激光雷达的扫描路径,识别出了激光束以掠射角照射抛光钢板表面的区域,产生了传感器误判为自由空间的反射。真实点云与模拟的直接对比证实,这些盲点恰好与撞击位置重合。
重新思考安全:从物理布局到沉浸式模拟 🚧
这起事故表明,仅依赖激光雷达传感器而不验证虚拟环境可能很危险。金属的镜面反射是高密度仓库中的一个关键盲点。作为改进,建议重新设计布局,在货架角落添加漫反射标记,并重新定位激光雷达支架以覆盖有问题的角度。Unreal Engine 5可以实时可视化这些修改,为安全工程师提供一种沉浸式工具,在物理实施前测试配置,从而降低新的多米诺效应风险。
Unreal Engine 5中的数字孪生参数在预测拣选机器人碰撞时出了什么问题?如何避免高密度仓库中的多米诺效应?
(附注:在Foro3D,我们优化路径就像优化多边形一样:直到计算机说够了为止)