在结构工程中,评估吊臂的疲劳强度至关重要,因为该部件承受动态和静态载荷,可能导致疲劳失效。本文探讨了吊臂的三维建模及其通过有限元分析(FEA)进行的仿真。可视化最大应力区域、累积变形和关键断裂点,比较静态载荷和重复循环下的行为,以预测其使用寿命。
三维建模与有限元疲劳分析 🛠️
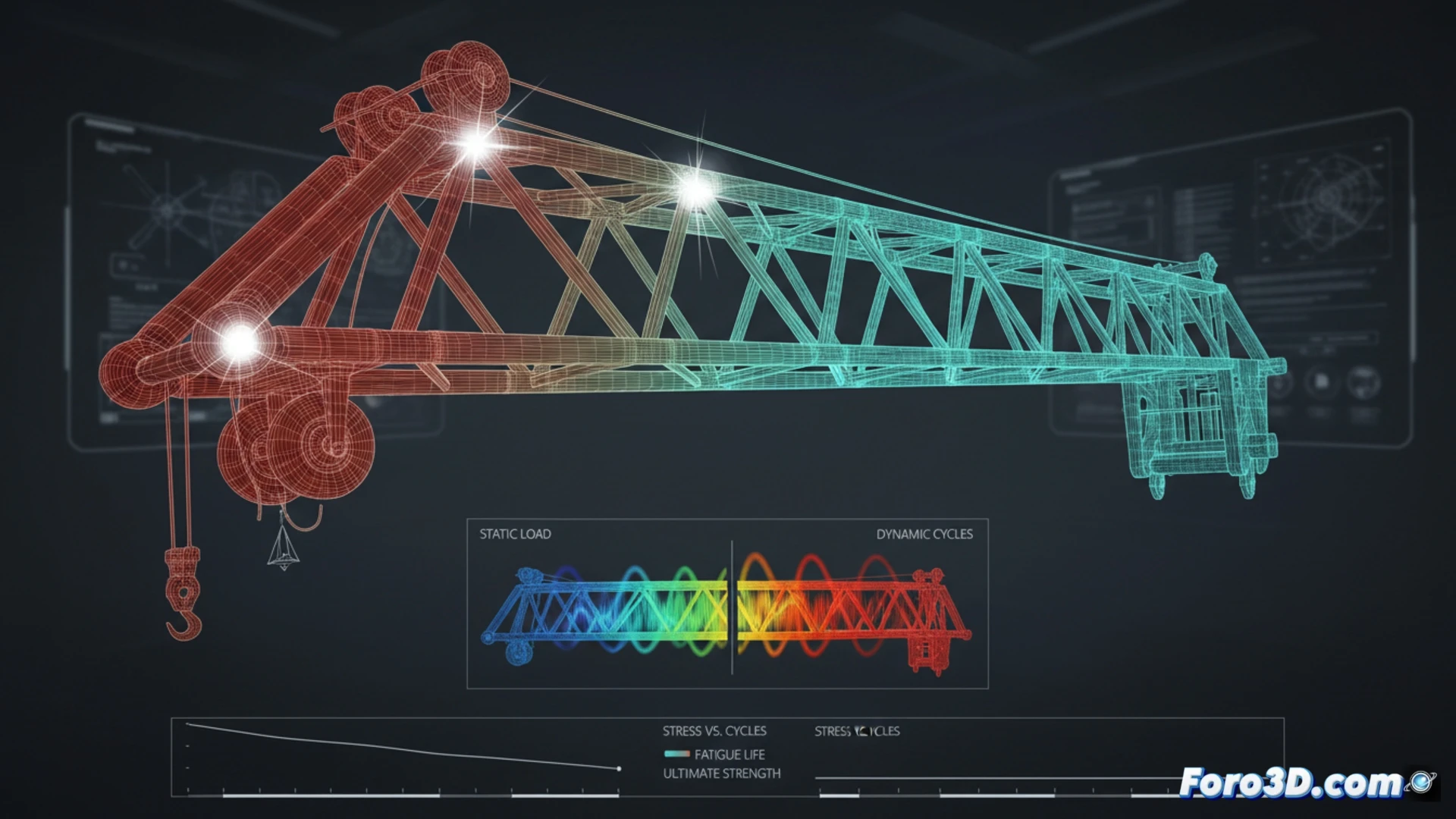
为开始仿真,创建吊臂的参数化三维模型,考虑其管状几何结构和焊接连接。在应力集中区域(如截面变化和连接处)细化网格。应用模拟实际锚固的边界条件,并引入代表起吊的循环载荷。有限元求解器使用古德曼或索德伯格准则执行高周疲劳(HCF)分析,提取冯·米塞斯应力图和寿命轮廓。结果表明,靠近主支撑的区域最容易产生裂纹萌生,在最大载荷下估计寿命为50,000次循环。
疲劳结构设计的关键经验 📐
该分析表明,吊臂的疲劳不仅取决于最大载荷,还取决于循环幅度和材料表面质量。仿真揭示,优化设计应避免尖角和应力集中器,优先采用大半径圆角。此外,静态与循环载荷的比较强调,静态安全裕度并不能保证疲劳强度,需要在设计过程中进行动态验证,以避免在服役中发生灾难性故障。
载荷外推方法的选择如何影响有限元分析在预测吊臂实际服役条件下疲劳寿命的精度?
(附注:材料的疲劳就像你模拟10小时后的状态。)