最近一起机器人货架系统故障事件,给物流和工业生产领域的工程师们敲响了警钟。这起自动化结构在运行中倒塌的事故,不仅导致供应链中断,还暴露了机械设计中隐藏的薄弱环节。为了探究根本原因,我们借助了3D仿真和数字孪生技术,这些工具能够逐毫米重现事件过程,并可视化每个组件的应力分布。
坍塌建模与结构应力分析 🏗️
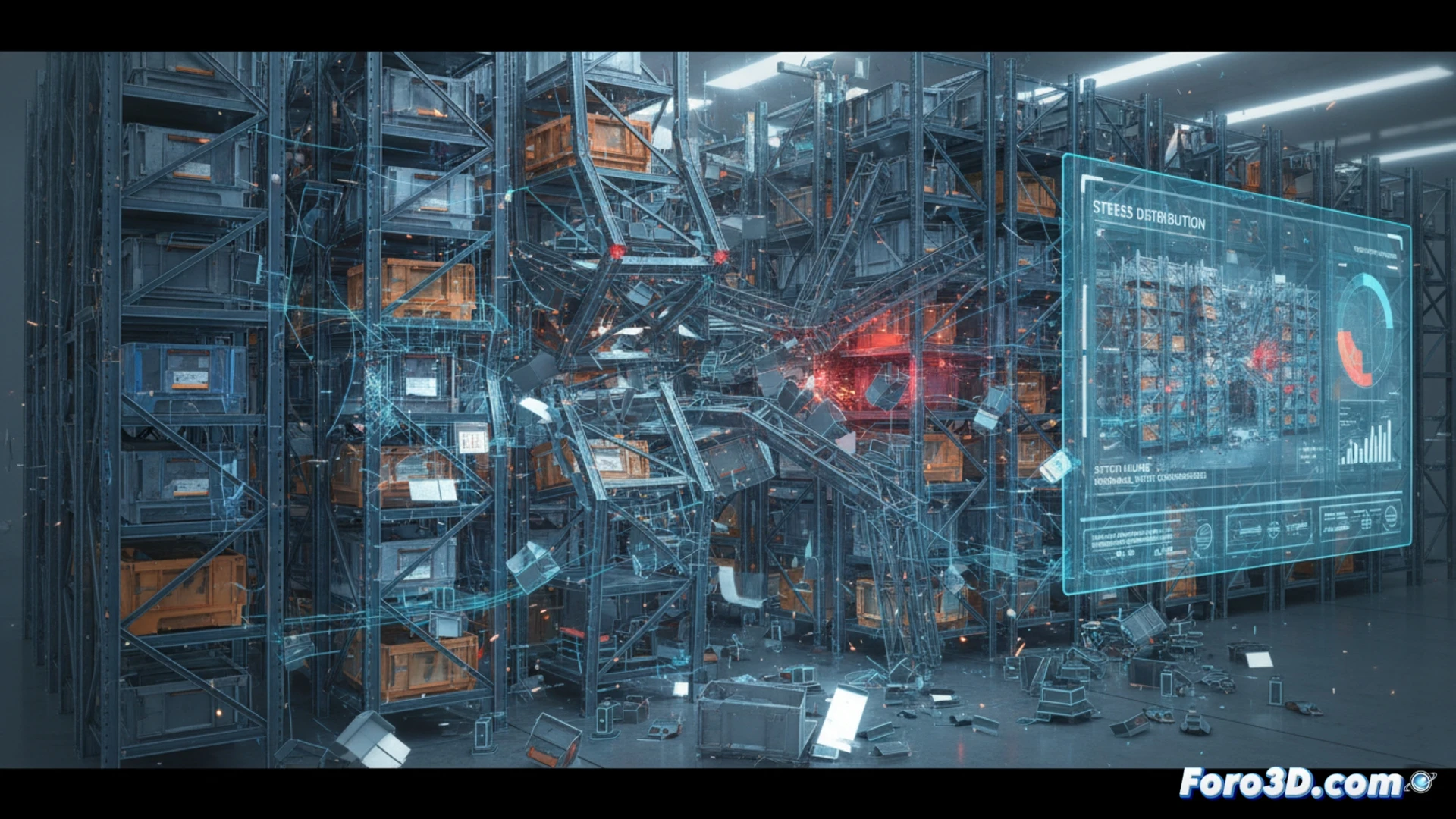
通过有限元分析(FEA)软件和参数化建模,我们重建了机器人货架的精确几何结构,包括导轨、支架和锚点。动态仿真再现了坍塌的序列:首先是底座连接处的渐进变形,然后是中央纵梁的脆性断裂。热力图显示,最大应力超过了钢材屈服极限的40%,位于导轨与垂直型材的连接点。这表明,材料疲劳在重复载荷循环的加剧下,是主要的触发因素。
基于数字孪生的预测性维护经验 🔧
这个案例表明,3D仿真不仅用于设计,还能在故障发生前进行预测。通过将物联网传感器数据集成到数字孪生中,我们可以实时监控每个货架的变形情况,并调整载荷循环。技术方案很明确:在虚拟模型中定期进行疲劳仿真,在数小时的计算时间内模拟10年的运行。这样就能识别关键点,安排主动维护,避免坍塌并优化机器人系统的使用寿命。
为了精确预测工业机器人货架的坍塌,3D仿真中应包含哪些关键的载荷和结构疲劳参数?
(附注:在Foro3D,我们优化路径就像优化多边形一样:直到电脑说“够了”)