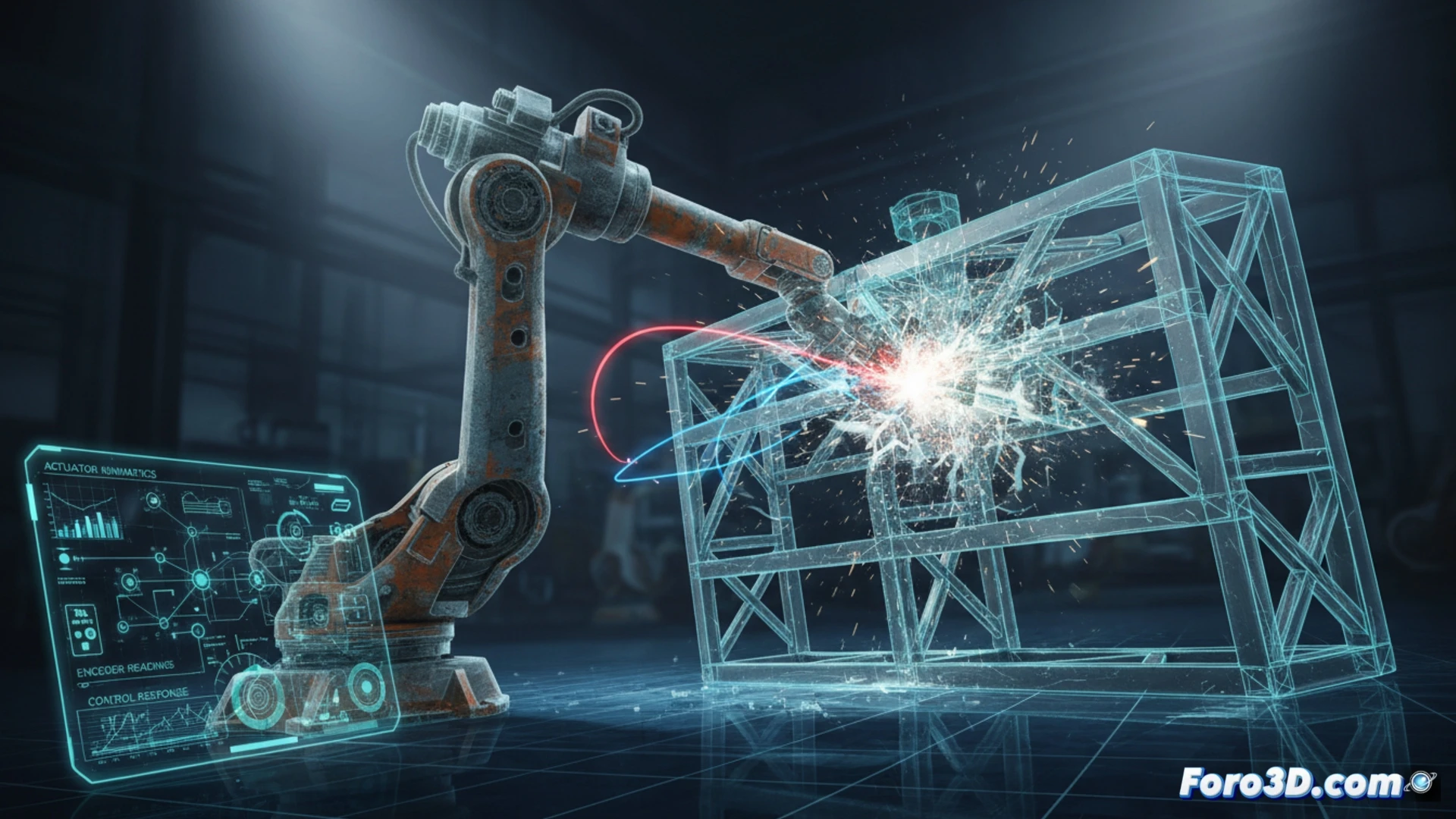
被称为涂装机器人错误的事件在工业安全领域引发了技术讨论。一台用于汽车零部件涂覆的机械臂突然偏离轨迹,撞击到金属结构。此案例成为取证流程的完美研究对象,其中场景的3D重建能够隔离变量,如执行器的运动学、编码器读数以及控制系统的响应。
轨迹模拟与机械故障分析 🔧
为了开展调查,利用LiDAR扫描仪捕获的点云生成了环境的数字模型。基于撞击前运动日志的机械臂动态模拟揭示了腕部旋转轴的异常。3D取证分析能够隔离角速度超过安全阈值的精确时刻,表明谐波减速器故障或旋转变压器信号损坏。这种方法排除了人为错误,将原因集中在机械部件的过早磨损上。
自动化环境预防的教训 🛡️
通过取证动画对事故的可视化不仅识别了断裂点,还建立了预测性维护的审查协议。振动传感器的集成以及逆运动学的实时监控可以预测类似的偏差。此案例表明,事件的3D文档是安全工程不可或缺的工具,将孤立错误转化为整个机器人行业可复制的教训。
哪种取证流程方法能够区分轨迹规划中的算法故障与涂装工业机器人错误3D重建中未建模的物理偏差?
(附注:在取证流程中,最重要的是不要将证据与参考模型混淆……否则你会在场景中遇到幽灵。)