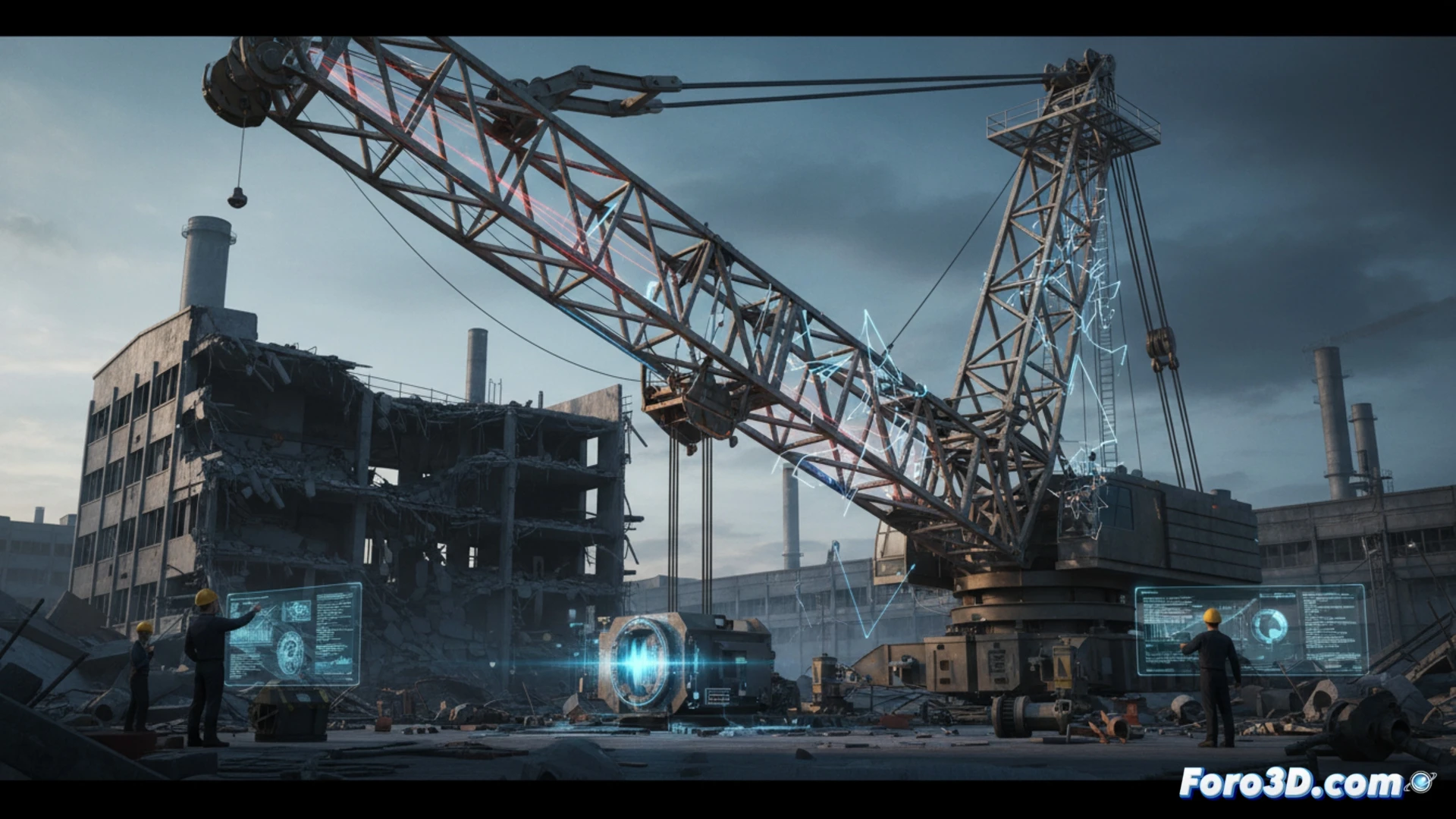
自主起重机的故障并非简单的机械事故;它是一场结合了软件错误、材料疲劳和不可预见的动态载荷的灾难。通过3D模拟分析倒塌序列,可以识别出结构应力的精确点,可视化力的重新分布,并理解微小裂缝如何引发整体坍塌。这个案例研究对于改进自动化工业环境中的安全协议至关重要。
吊臂结构中的应力与疲劳建模 🏗️
3D重建始于起重机CAD模型的数字化,应用了高强度钢和铝合金等材料属性。通过有限元分析(FEA),模拟了最大工作载荷和累积的疲劳周期。关键点出现在吊臂与旋转桅杆的连接处,在平衡传感器失效后,剪切应力超过了弹性极限。3D动画展示了渐进变形如何导致侧向屈曲,随后是可伸缩段的级联倒塌。几何体上的热力图可视化揭示了传统视觉检查中未检测到的风险区域。
通过数字孪生和应急协议进行预防 🛡️
模拟的灾难表明,面对完全自主,人类监督仍然不可替代。实施实时数字孪生可以在疲劳失效发生前进行预测,根据使用历史调整载荷限制。从这次3D重建中汲取的教训要求冗余的紧急停止协议和节点点的振动传感器。只有将预测性模拟与预防性维护相结合,才能避免技术故障演变为工业灾难。
如果灾难的3D重建揭示,由于载荷优先级算法的错误,自主起重机忽略了结构警告信号,那么应该在数字孪生中实施哪些安全协议,以防止机器重复这种故障模式?
(附注:模拟灾难很有趣,直到电脑过热,而你自己就成了灾难。)