最近发生的一起事件中,一台大型矿用机器人在开采作业时其机械臂发生灾难性断裂,这使极端环境下的机械故障问题成为焦点。这类设计用于承受循环载荷和磨蚀性工况的机械突然失效,表明可能是材料疲劳失效或控制系统未能检测到的过载所致。从工程角度分析这一事件,有助于我们理解如何优化此类设备的设计与监控。
材料疲劳、过载与软件错误导致的故障 ⚙️
此次断裂的技术原因可分为三大方面。首先,材料疲劳:矿用机器人在持续振动和冲击下运行,导致钢或铝合金中产生微裂纹,随时间推移发展为脆性断裂。其次,操作过载:若传感器系统未正确校准所采物料重量,或机器人在强制旋转时超过其最大扭矩,则执行器和连接处的应力会超过弹性极限。第三,轨迹控制中可能存在的软件错误,例如有缺陷的反馈回路指令执行了未补偿惯性的急动动作,从而在结构关键点产生应力峰值。
3D仿真与数字孪生如何避免此类故障 🛠️
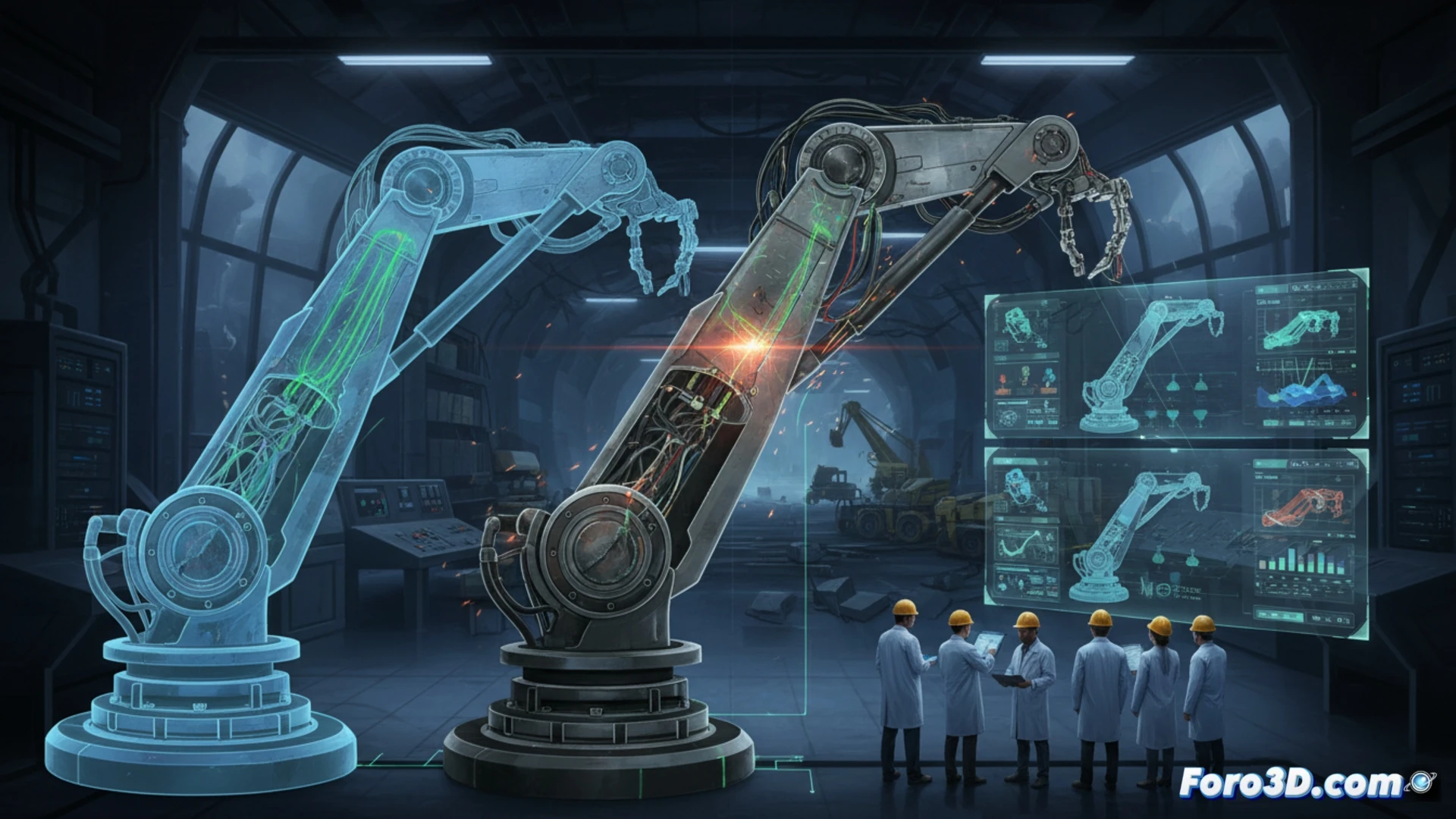
利用数字孪生进行仿真是预测和预防此类断裂的关键工具。通过使用应力-应变数据对机器人进行3D建模,可以生成热力图,显示疲劳累积的关键点,如球窝接头或机械臂焊缝。数字孪生允许执行数千次虚拟载荷循环而无需磨损实际设备,从而在过载发生前识别出来。此外,它还能集成物联网传感器数据,在出现异常振动时发出警报,并在微裂纹首次出现时停机,从而避免自动化采矿中的灾难性断裂。
数字孪生如何能精确预测和预防矿用机器人机械臂在发生灾难性断裂前的疲劳失效模式,同时考虑动态载荷和地下环境磨蚀等变量?
(附注:模拟机器人很有趣,直到它们决定不听从你的指令。)