用乐高积木构建机器人手:从想象到数字动画
可访问机器人技术在乐高积木中找到了其最大代表,将玩具转变为强大的教育工具。原本简单的构建现在可以使用仅由可互连塑料制成的积木复制人类生物力学复杂性🦾。
模块化设计的的技术演变
Lego Technic系统奠定了关节机制的基础,这些机制随后演变为精密原型。全球创客社区证明了创新不需要奇异材料,而是系统应用的创造力。
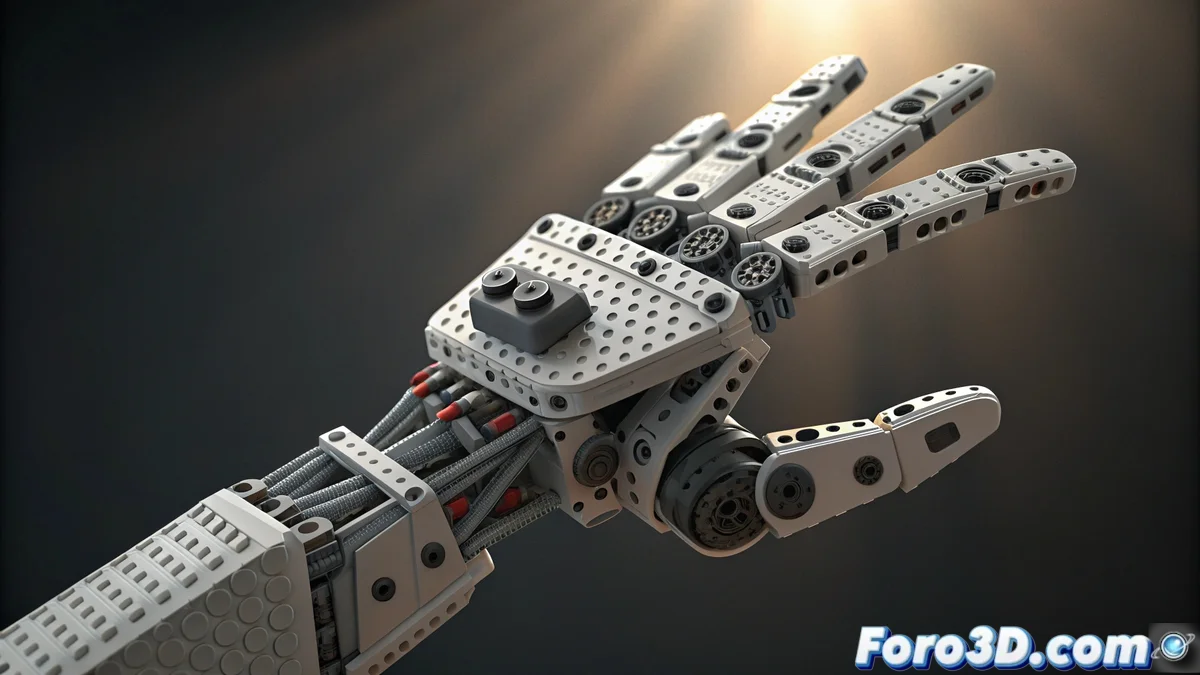
突出技术特性:- 使用尼龙线的人工肌腱系统,实现流畅精确的运动
- 球形关节,复制类似于人类关节的5个自由度
- 带有基本压力传感器的夹持机制,用于抓取操作
真正的魔法发生在限制转化为创造力的催化剂时——每块乐高积木都讲述了一个应用智慧的故事
教育和专业影响
这些项目已民主化了对机器人工程的访问,激励数千年轻人探索STEM职业。乐高机器人手作为游戏与技术专业化之间的完美桥梁。
已开发实用应用:- 使用相同模块化原理的低成本医疗假肢原型
- 带有集成触觉反馈的职业治疗训练系统
- 通过有形构建教授逆运动学的教育平台
技术指南:OpenToonz中的逐步动画
要将你的乐高机器人手带入数字世界,请在OpenToonz中遵循这些详细步骤。初始设置:转到File > New Project,设置分辨率1920x1080,帧率24 fps,时长240帧(10秒)。在Scene Settings中,将DPI调整为72,颜色深度为32位🎬。
层和结构配置:- 创建5个主要矢量层:Base(不透明度100%)、Articulaciones(不透明度80%)、Dedos(不透明度100%)、Mecanismos(不透明度70%)、Efectos(不透明度50%)
- 在颜色调色板中定义特定色调:乐高红#FF0000,乐高蓝#0055BF,乐高黄#F7D117,明灰#C0C0C0
- 激活网格,Grid Size 50px并启用Snap以实现精确对齐
- 使用Geometry Tool,启用填充并笔触宽度3px,将手掌创建为200x150px矩形
- 对于指骨,使用Rectangle Tool,尺寸40x25px,圆角半径5px
- 关节使用Ellipse Tool创建为直径15px的圆形,带有径向渐变填充
- 在Render > Shader中应用Plastic shader,镜面反射0.8,粗糙度0.1,折射率1.4
- 创建3个光源:Key Light(强度1.2,角度45°,颜色#FFFFE0)、Fill Light(强度0.6,角度15°,颜色#FFFFFF)、Back Light(强度0.8,角度135°,颜色#B3E0FF)
- 对于材料,在Style Editor中应用Flat Color,亮度1.0,对比度1.2以模拟塑料
- 使用Skeleton Tool创建骨骼结构:手掌1个主骨,每根手指3个骨头,每个长度30px
- 在Animation > Function Editor中配置缓动曲线:ease-in-out用于自然运动,每6帧一个关键帧
- 在关节上应用Plastic deformation,强度0.3以模拟逼真弯曲
- 从Effects Panel添加Depth of Field:焦距400px,光圈2.8,最大模糊15px
- 对于相机运动,创建带有4个关键帧的相机路径:初始位置(0,0,800),最终位置(300,150,600)
- 在Render > Output Settings中导出:格式MP4,编解码器H.264,质量90%,帧率24 fps,分辨率1920x1080
应用创造力的持续遗产
这些项目证明了创新源于创造性限制。从物理构建到OpenToonz中精确数字动画的过渡代表了实践学习向技术专业化的自然演变🌟。