如何在逆向运动链中定位和配置滑动关节
在逆向运动学(IK)动画领域,滑动关节是一种基本约束。它允许骨骼沿定义的直线轨迹进行受控平移,这是模拟真实机制的关键资源。然而,找到这个选项可能是一个挑战,因为并非所有系统都直接标记它。🛠️
在哪里查找滑动功能
滑动骨骼的配置很少出现在名为“滑动关节”的明确菜单中。通常,它集成在管理关节限制的参数中。要访问它,你需要检查骨骼或正在使用的IK控制器的属性面板。
常见检查位置:- “限制”或“Joint”部分:查找控制X、Y和Z轴平移的参数。
- “约束”面板:一些程序在这里分组锁定或允许自由度的选项。
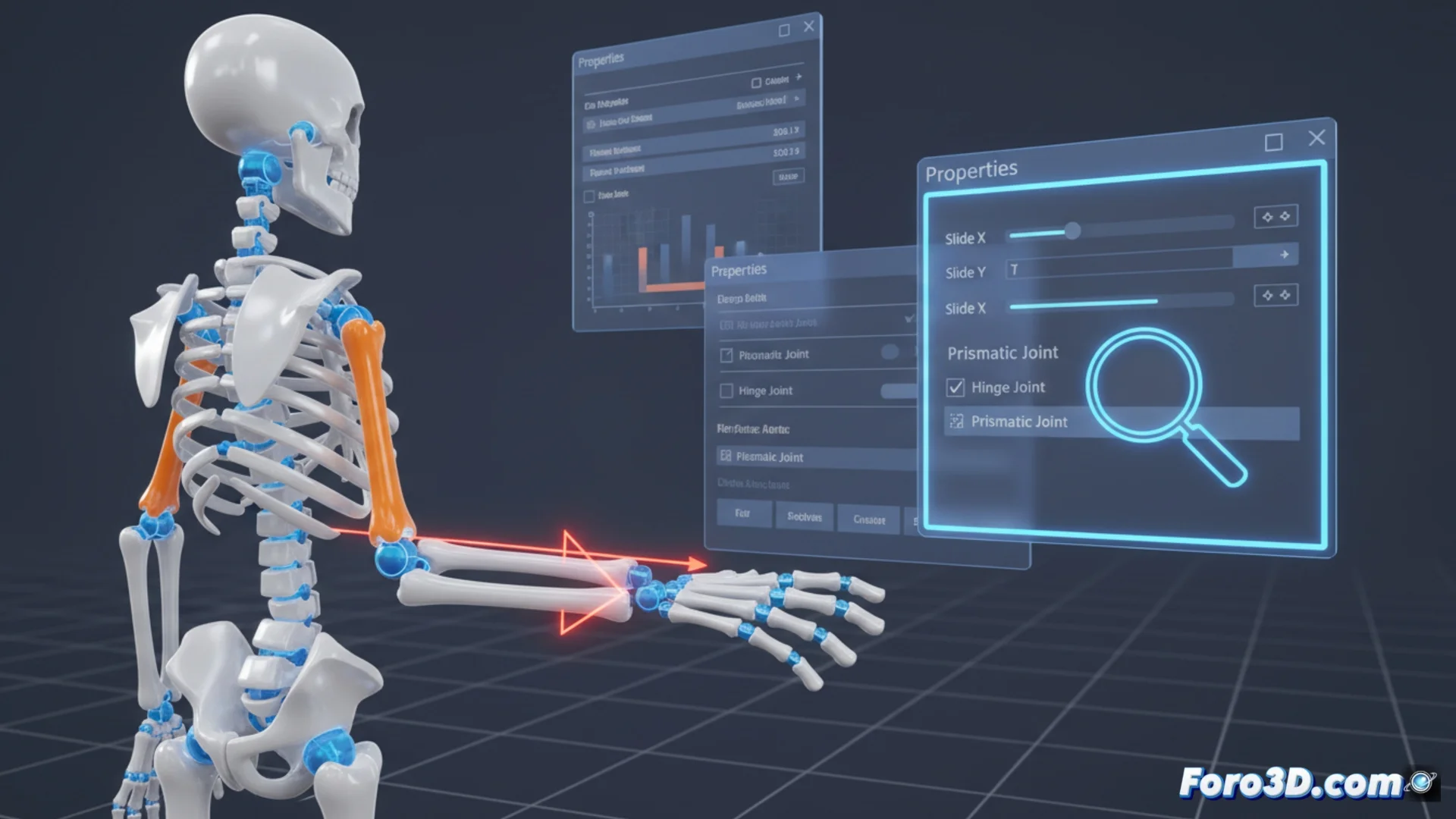
- 特定复选框:如"Slide"、"Prismatic"或"Linear"等名称,通常为特定轴启用滑动行为。
为一个轴激活不同的最小和最大限制通常会使系统解释为该骨骼可以在该范围内滑动。
定义滑动的程序
一旦定位正确的控件,配置线性运动的过程就很直接。目标是创建一个虚拟轨道,以精确界定骨骼的轨迹。这种方法非常适合产生活塞、滑轨或IK链中任何具有直线位移的元素效果。
配置步骤:- 选择轴:选择应发生平移的轴(X、Y或Z)。这定义了运动方向。
- 定义范围:设置最小和最大距离值。这些值标记了滑动行程的终点。
- 锁定旋转:确保该轴的旋转被限制,以强制唯一可能的运动为线性。
关于其效用的结论
掌握滑动关节的使用极大地扩展了逆向运动链的潜力。尽管有时该选项似乎故意隐藏在菜单中,但其正确配置允许以极大的真实感动画化受控线性运动机制,为你的rig添加一层复杂性和精确度。🔩