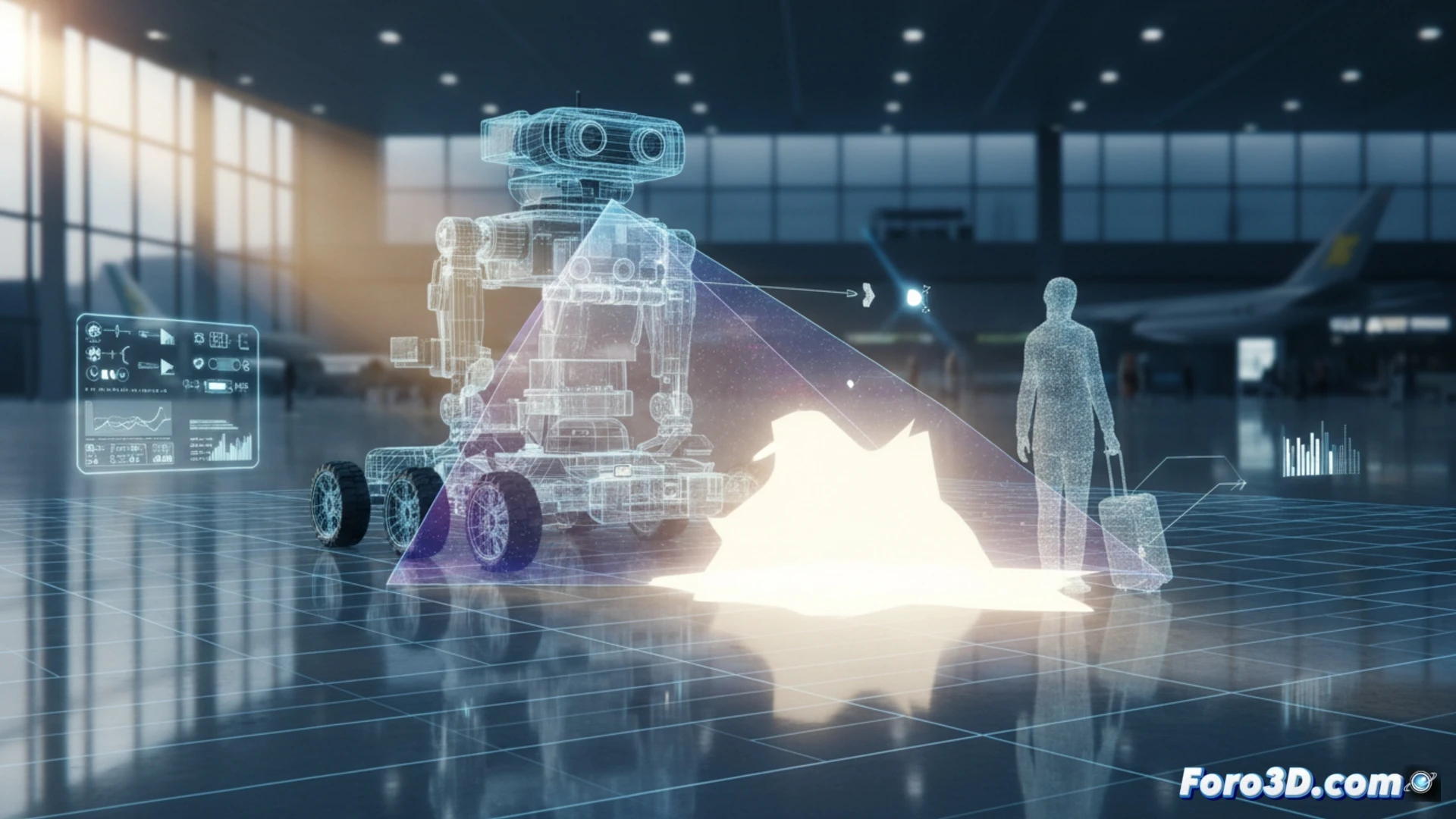
دهس روبوت مستقل لإدارة الأمتعة أحد الركاب في صالة مطار خلال ساعات ذروة أشعة الشمس. ركز التحقيق الجنائي على إعادة بناء المجال البصري لنظام الكاميرات المجسمة للروبوت لتحديد ما إذا كان انعكاس الشمس على الأرضية المصقولة قد أنشأ منطقة خطأ في العمق. تمثل هذه الحالة علامة فارقة في تطبيق التقنيات ثلاثية الأبعاد لتحليل الحوادث مع الأنظمة المستقلة، حيث فشل الإدراك البصري بسبب الظروف البيئية القاسية.
سير العمل الجنائي: التصوير المساحي، LiDAR والمحاكاة في Unreal Engine 5 🛠️
بدأت العملية بجمع بيانات منطقة الحادث باستخدام مسح LiDAR والتصوير المساحي باستخدام RealityCapture، مما أدى إلى توليد سحابة نقاط عالية الكثافة للأرضية ومنطقة الاصطدام. في CloudCompare، تمت محاذاة بيانات البيئة مع النموذج CAD للروبوت لإعادة بناء الموقع الدقيق لأجهزة الاستشعار الخاصة به في وقت الحادث. ثم، في Unreal Engine 5، تمت محاكاة المجال البصري المجسم، مع تطبيق مادة عاكسة على الأرضية وضبط الإضاءة الشمسية الحقيقية. أكدت المحاكاة أن الانعكاس أنتج تدرجًا في السطوع أشبع البكسلات في منطقة معينة، مما ألغى التباين الثنائي وأنشأ بقعة عمياء بصرية بقطر 40 سم تمامًا حيث كان الراكب واقفًا.
دروس لتصميم أجهزة الاستشعار في الروبوتات المستقلة 🤖
يُظهر هذا التقرير أن أنظمة الرؤية المجسمة، على الرغم من قوتها في الظروف الخاضعة للرقابة، إلا أنها عرضة للأسطح العاكسة والتغيرات الشديدة في الإضاءة. المنهجية المطبقة، التي تجمع بين التصوير المساحي ومحاذاة سحابة النقاط ومحاكاة أجهزة الاستشعار، تؤسس لخط أنابيب جنائي قابل للتكرار للحوادث المستقبلية مع الروبوتات المستقلة. التحقق من فرضية انعكاس الشمس يُلزم الشركات المصنعة بدمج التكرار الحسي، مثل LiDAR زمن الطيران، للتخفيف من هذه البقع العمياء البصرية في بيئات المطارات.
كيف يمكن لإعادة البناء ثلاثي الأبعاد الجنائي تحديد تأثير الإطباق البصري الناتج عن الظلال المسقطة على مسار روبوت مستقل أثناء حادث في مطار؟
(ملاحظة: في خط الأنابيب الجنائي، أهم شيء هو عدم خلط الأدلة مع النماذج المرجعية... وإلا سينتهي بك الأمر بشبح في المشهد.)