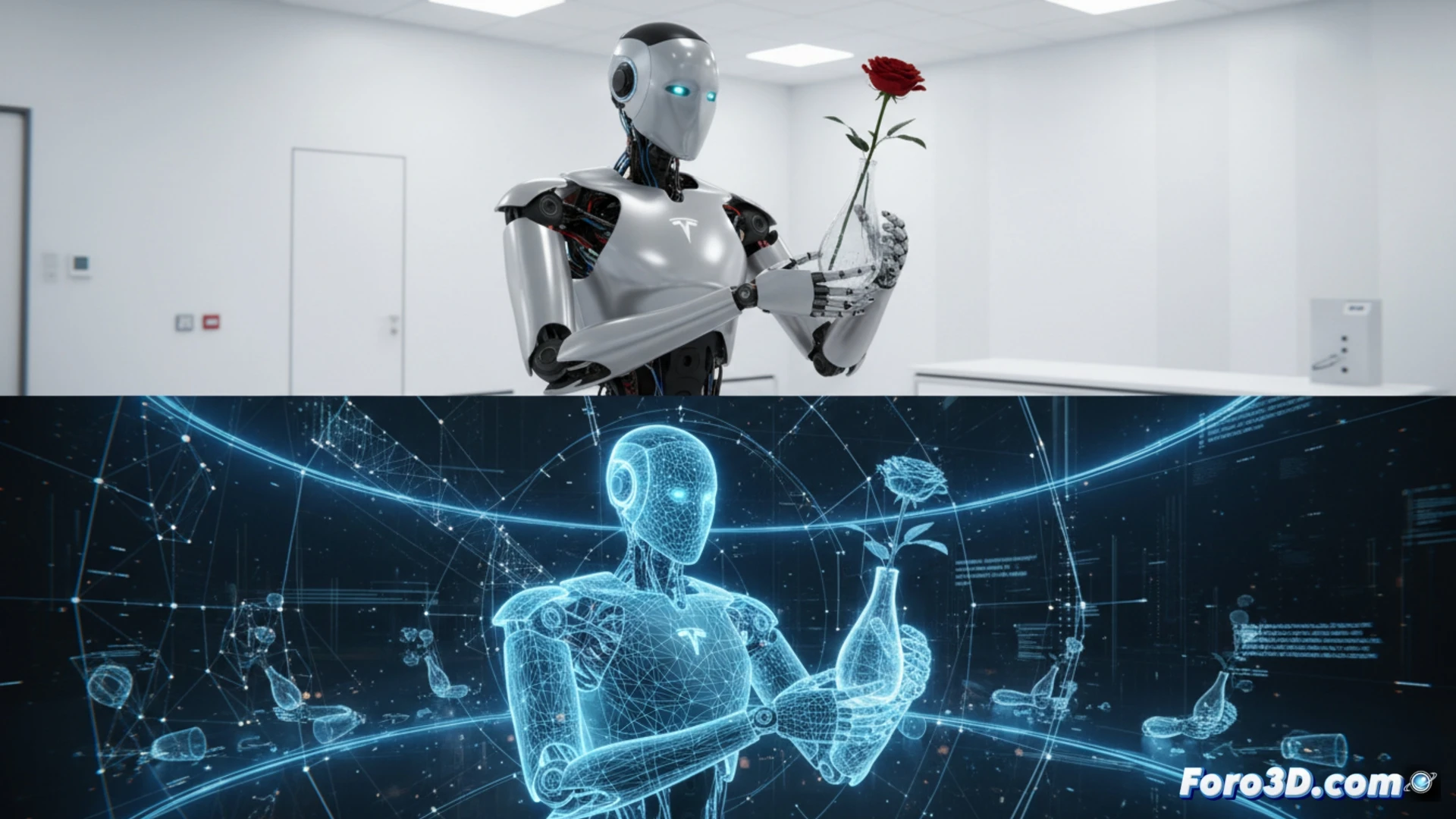
روبوت تسلا البشري الجديد، أوبتيموس الجيل الثاني، ليس مجرد تمرين في الهندسة الميكانيكية؛ بل هو انتصار لبرامج المحاكاة ثلاثية الأبعاد. لتحقيق قدرة آلة تزن 63 كجم على المشي بسلاسة والتعامل مع بيضة دون كسرها، كان على تسلا إعادة إنشاء كل مفصل وكل مستشعر في بيئة افتراضية. هذا التوأم الرقمي يدرب الذكاء الاصطناعي الروبوتي من خلال التجربة والخطأ، مما يسمح للنموذج المادي بوراثة حركات مصقولة دون المخاطرة بمكونات حقيقية.
النمذجة الميكانيكية الحيوية ومحاكاة أجهزة الاستشعار اللمسية 🤖
القفزة النوعية في الجيل الثاني تكمن في تحكمه الميكانيكي الحيوي. لتحقيق ذلك، يبني المهندسون نموذجًا ثلاثي الأبعاد للروبوت يكرر مركز كتلته وعطالة كل جزء. على هذا النموذج، تُجرى محاكاة فيزيائية عكسية للتنبؤ بمسارات التوازن. المفتاح يكمن في أجهزة الاستشعار اللمسية الافتراضية: في البيئة ثلاثية الأبعاد، تُحاكى تشوه وسادة عند الضغط على جسم ما. يتعلم الذكاء الاصطناعي قراءة تلك البيانات الاصطناعية لضبط قوة الإمساك، مترجمًا إشارة رقمية إلى لمسة شبه بشرية.
التصور ثلاثي الأبعاد كطريق مختصر نحو الاستقلالية 🚀
التحقق من خلال التصور ثلاثي الأبعاد يسمح لتسلا بالتكرار بشكل أسرع من استخدام النماذج الأولية المادية. بمحاكاة السقوط وتصحيحات الوضعية في بيئة معروضة، ينضج برنامج التحكم دون تآكل ميكانيكي. هذا لا يسرع التطوير فحسب، بل يعيد تعريف الأتمتة: لم يعد الروبوت منفذًا صارمًا، بل نظامًا يفهم جسده في ثلاثة أبعاد. الخطوة التالية ستكون أن يتعلم التوأم الرقمي بمفرده التنقل في مصانع بأكملها قبل أن يخطو أوبتيموس خطوته الحقيقية الأولى.
كيف يسمح استخدام التوأم الرقمي لأوبتيموس الجيل الثاني بأداء مهام دقيقة دون إتلاف الأشياء الهشة، وما المزايا التي تقدمها هذه المحاكاة مقارنة بالطرق التقليدية لتدريب الروبوتات؟
(ملاحظة: محاكاة الروبوتات ممتعة، حتى يقرروا عدم اتباع أوامرك.)