يمثل تراكم الكائنات الحية الملتصقة، أو التلوث الحيوي، تحديًا حاسمًا لقابلية تشغيل المركبات الغاطسة، مما يؤثر على ديناميكيتها المائية ويزيد من استهلاك الطاقة. يكمن الحل الحديث في التوائم الرقمية: نسخ افتراضية تدمج البيانات في الوقت الفعلي من أجهزة استشعار الضغط ودرجة الحرارة والكاميرات تحت الماء لنمذجة نمو الطحالب والبرنقيل والرخويات على الهيكل. توضح هذه المقالة التقنية بالتفصيل بنية التوأم الرقمي المطبق على المراقبة التنبؤية للتلوث الحيوي، مما يحول مشكلة بيولوجية إلى أصل بيانات قابل للإدارة.
هندسة التوأم الرقمي والنمذجة التنبؤية 🌊
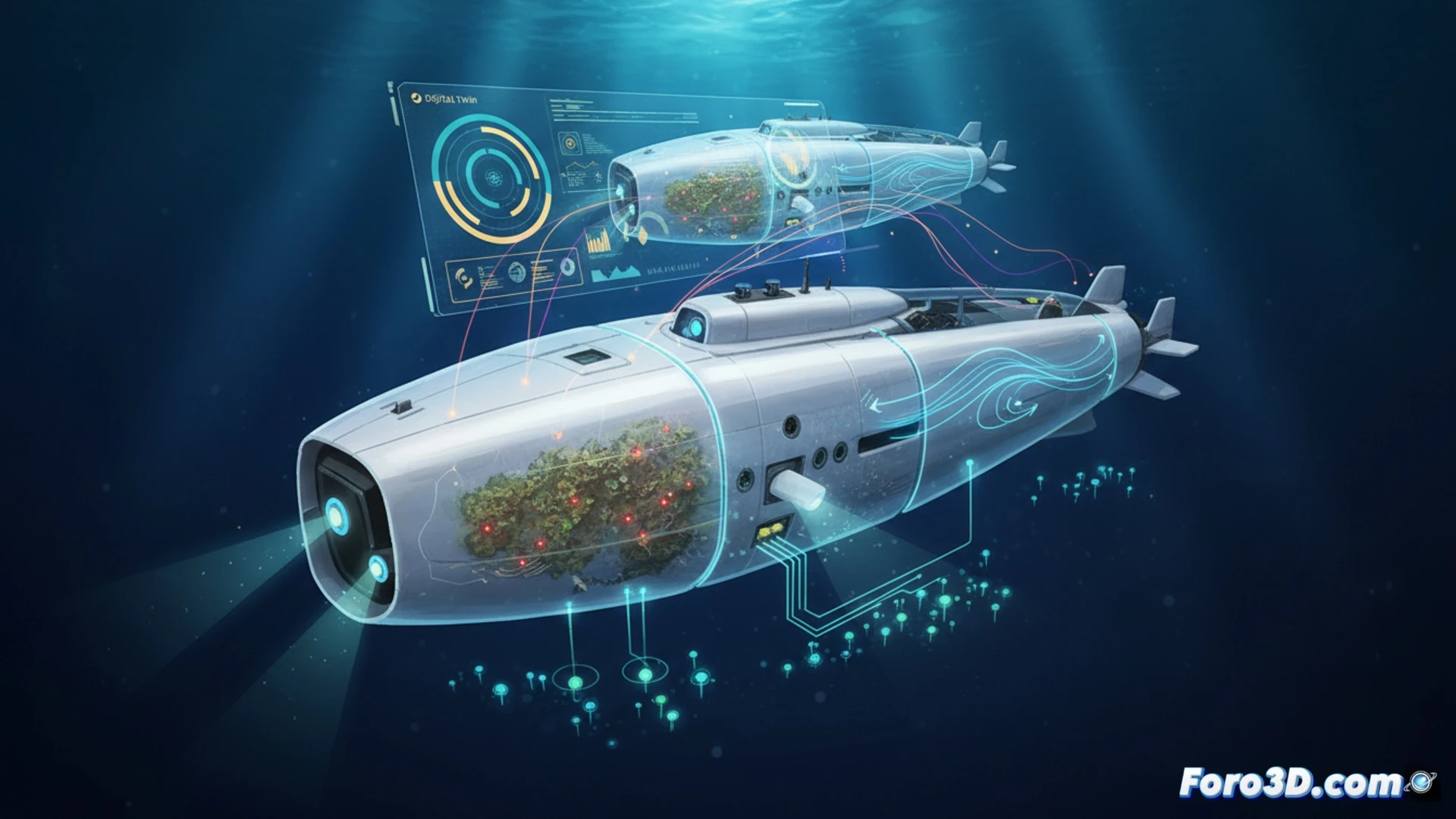
يبدأ بناء التوأم الرقمي بجمع البيانات عبر أجهزة استشعار إنترنت الأشياء الموضوعة في نقاط استراتيجية من الغاطسة، مثل المروحة ومآخذ المياه وأسطح التحكم. تسجل هذه المستشعرات معلمات مثل درجة حرارة السطح والضغط الهيدروستاتيكي والتدفق المحلي، بينما تلتقط الكاميرات عالية الدقة صورًا لتقسيم وتحديد كمية تغطية الكائنات الحية. يستخدم محرك المحاكاة، المطور في Unity أو Unreal Engine، هذه البيانات لتغذية نموذج ديناميكيات الموائع الحسابية (CFD) المخفض، القادر على التنبؤ بنقاط الترسيب الحرجة. يتم تحديث التوأم الرقمي كل ساعة، مما يسمح للمشغلين بتصور تطور التلوث الحيوي ثلاثي الأبعاد وتلقي تنبيهات مبكرة عندما تتجاوز خشونة الهيكل حدًا محددًا مسبقًا، مما يحسن مسارات الصيانة ويقلل التكاليف التشغيلية بنسبة تصل إلى 20%.
المحيط كمختبر افتراضي 🐟
إلى جانب الكفاءة التقنية، يجبرنا هذا النهج على إعادة التفكير في العلاقة بين الهندسة والنظم البيئية البحرية. من خلال دمج الكائنات الحية في توأم رقمي، نحول التلوث الحيوي من عدو يجب القضاء عليه إلى مؤشر بيولوجي لصحة المحيطات. قد يشير الارتفاع المفاجئ في الترسيب إلى تغيرات في درجة حرارة الماء أو توافر المغذيات، مما ينبه إلى تغييرات بيئية محتملة. وهكذا، تتوقف الغاطسة عن كونها مجرد آلة لتصبح مستشعرًا لبيئتها الخاصة، مما يدمج المراقبة الصناعية مع العلوم المدنية في نموذج افتراضي واحد.
كيف يمكن دمج توأم رقمي مع أجهزة استشعار المعاوقة والرؤية الحاسوبية للتنبؤ في الوقت الفعلي بتوزيع وسمك التلوث الحيوي على سطح غاطسة؟
(ملاحظة جانبية: توأمي الرقمي موجود الآن في اجتماع، بينما أنا هنا أقوم بالنمذجة. لذا، من الناحية التقنية، أنا في مكانين في وقت واحد.)