أثناء عملية جراحية بمساعدة نظام دافنشي نيكست، نفّذ ذراع روبوتي حركة غير مأمورة، مما عرض سلامة الإجراء للخطر. أدى الحادث إلى تفعيل تحليل جنائي عميق جمع بين المحاكاة باستخدام روبوغايد، ودراسة التوأم الرقمي للروبوت، وفحص المحركات الدقيقة باستخدام المجهر ثلاثي الأبعاد كينس VHX، مما كشف عن أعطال مبكرة غير قابلة للكشف بواسطة برامج التشخيص القياسية.
إعادة بناء الحركة غير المأمورة باستخدام روبوغايد وماتلاب 🤖
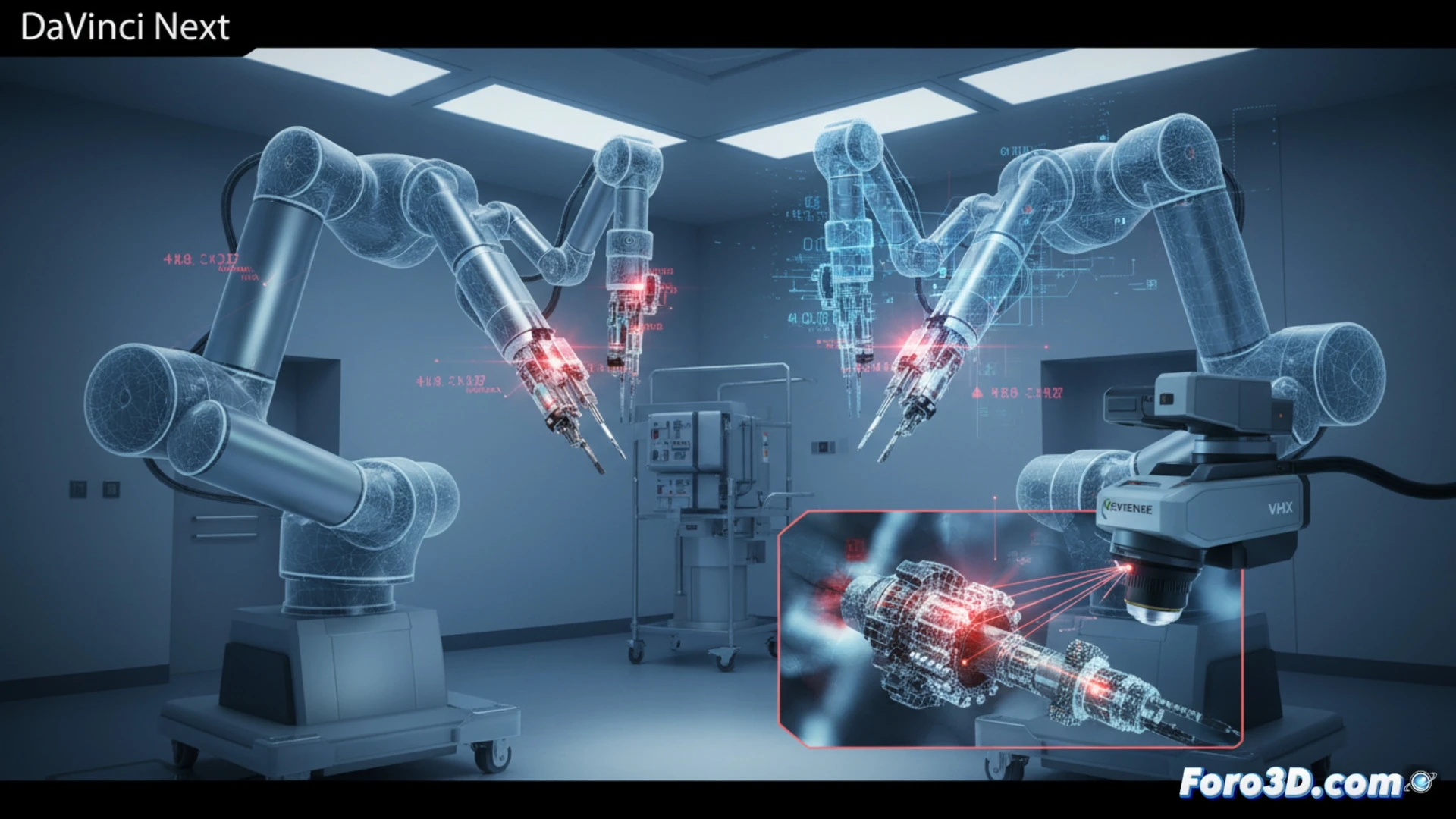
حمّل فريق الهندسة سجلات القياس عن بُعد للروبوت في ماتلاب لتحديد التسلسل الدقيق للأوامر والانحرافات. تم اكتشاف ذروة تيار غير طبيعية في محرك دقيق للذراع رقم 3. لتصور حركية العطل، تم استيراد نموذج التوأم الرقمي إلى روبوغايد، مع إعادة إنشاء المسار غير المرغوب فيه. أكدت المحاكاة أن الانحراف الزاوي تزامن مع كسر دقيق في الترس الكوكبي للمحرك، وهو ما لم يكن مرئيًا إلا تحت المجهر ثلاثي الأبعاد كينس VHX بتكبير 500 مرة، حيث كانت علامات تآكل الإجهاد المادي واضحة.
دروس للصيانة التنبؤية في الأتمتة الطبية 🔬
تثبت هذه الحالة أن الموثوقية في الروبوتات الجراحية لا يمكن أن تعتمد فقط على الاختبارات الوظيفية. يتيح دمج التوائم الرقمية مع المحاكاة في روبوغايد والتحليل المجهري ثلاثي الأبعاد إنشاء نماذج للتآكل التنبؤي. من خلال ربط سجلات ماتلاب مع صور كينس، يمكن وضع عتبات للاهتزاز أو التيار تتنبأ بالأعطال الكارثية. بالنسبة للقطاع، يعني هذا اعتماد نهج هجين للفحص المادي والرقمي، مما يرفع معايير السلامة في الأتمتة.
هل من الممكن التنبؤ بفشل ذراع روبوتي دافنشي نيكست أثناء الجراحة من خلال التكامل الفوري للتوأم الرقمي مع بيانات المجهر عن التآكل الميكانيكي؟ 🏥
(ملاحظة: محاكاة الروبوتات ممتعة، حتى يقرروا عدم اتباع أوامرك.)