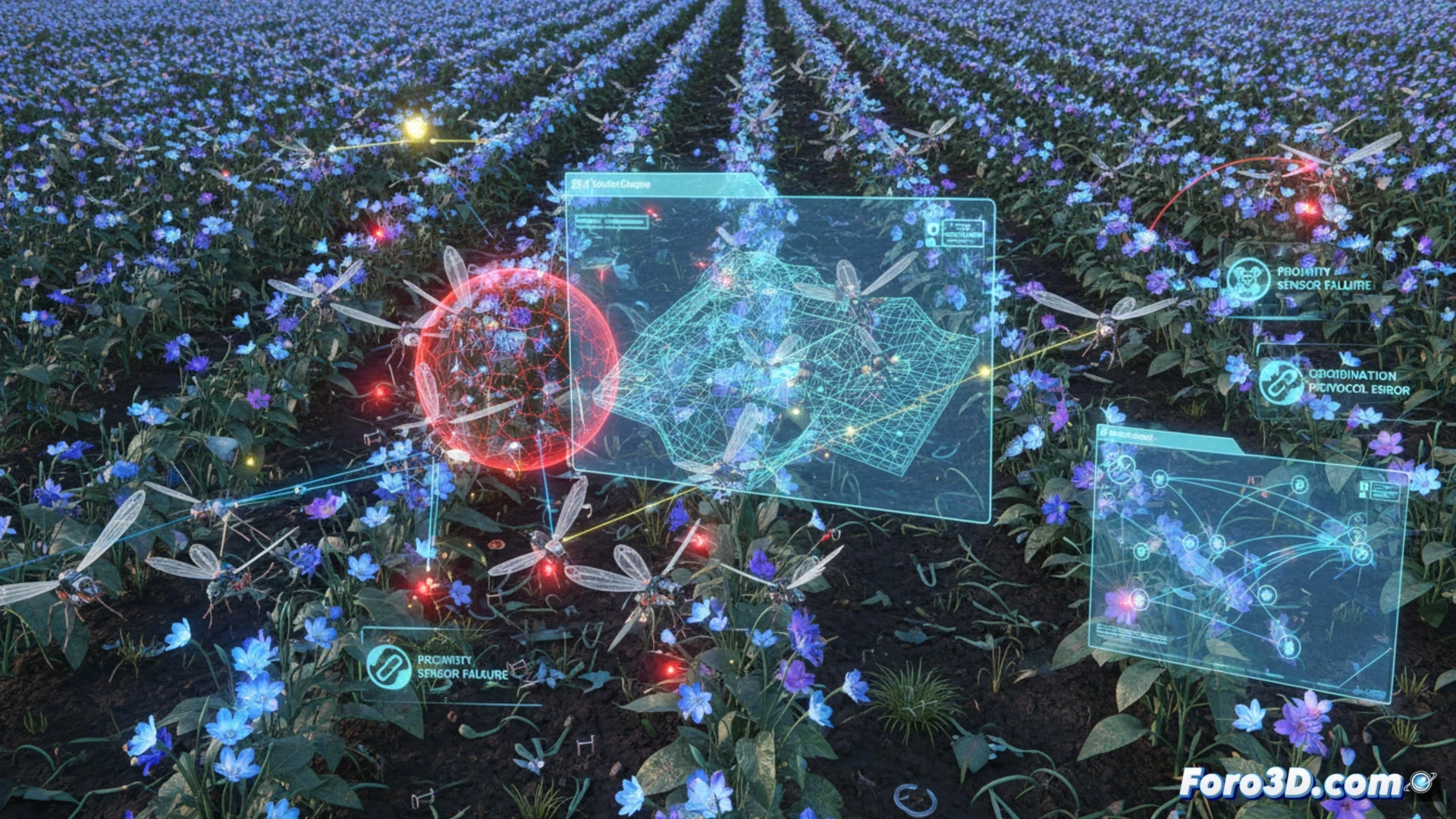
أدى سرب من الطائرات الدقيقة الملقحة إلى تدمير محصول تجريبي بعد عطل كارثي. يتيح إعادة البناء ثلاثي الأبعاد للحادث، باستخدام أدوات مثل RealityCapture و 3ds Max، تحليل مسارات الطيران وبيانات أجهزة استشعار القرب. تكشف هذه الحالة عن نقاط ضعف حرجة في أتمتة المحاصيل المكثفة، حيث يكون التنسيق بين الروبوتات ضروريًا لتجنب الاصطدامات وضمان التلقيح الفعال.
محاكاة المسارات وأجهزة الاستشعار في V-REP و Gazebo 🤖
لفهم العطل، من الضروري نمذجة سلوك السرب في بيئات المحاكاة الروبوتية. يسمح V-REP بإعادة إنشاء فيزياء طيران الطائرات الدقيقة وبرمجة خوارزميات تجنب العوائق بناءً على أجهزة استشعار فوق صوتية أو LiDAR. من ناحية أخرى، يوفر Gazebo بيئة أكثر واقعية لاختبار التفاعل بين عوامل متعددة والمحصول. في هذه الحالة، يشير إعادة البناء ثلاثي الأبعاد إلى أن خطأ في معايرة أجهزة استشعار القرب تسبب في عدم تزامن السرب، مما أدى إلى اصطدام الطائرات ببعضها البعض وبالنباتات، بدلاً من تلقيحها.
دروس للروبوتات الزراعية 🌱
العطل ليس حادثة منعزلة، بل هو انعكاس للتحديات الحالية في الروبوتات الزراعية. يؤدي الاعتماد على أجهزة استشعار منخفضة التكلفة للحفاظ على الجدوى الاقتصادية للأسراب إلى إدخال مخاطر العطل. يجب أن تتضمن المحاكاة المسبقة في V-REP و Gazebo سيناريوهات ضوضاء الاستشعار وفقدان الاتصال. فقط من خلال تحليل ثلاثي الأبعاد مفصل والتحقق الصارم من خوارزميات الطيران يمكننا منع تحول المحصول التجريبي التالي إلى حقل من الحطام.
ما الدور الذي لعبته خوارزميات تجنب الاصطدام ثلاثية الأبعاد في انتشار عطل السرب، وكيف كان يمكن نمذجة سلوكه الفوضوي أثناء إعادة البناء الافتراضي للحادث؟
(ملاحظة: محاكاة الروبوتات ممتعة، حتى يقرروا عدم اتباع أوامرك.)