اصطدم روبوت انتقاء برف في مستودع عالي الكثافة، مما تسبب في تأثير الدومينو الذي أسقط عدة صفوف من الحمولة. كان من الممكن تجنب الحادث لو كانت أجهزة استشعار LIDAR قد اكتشفت بشكل صحيح قرب العائق. لفهم الخلل، تم إعادة تمثيل الحادث باستخدام توأم رقمي، ومقارنة البيانات الحقيقية الممسوحة ضوئيًا باستخدام FARO Scene مع عمليات المحاكاة في Gazebo والتصورات في Unreal Engine 5. كان الهدف هو تحديد النقاط العمياء الناتجة عن الانعكاسات المرآوية على الأسطح المعدنية للممر.
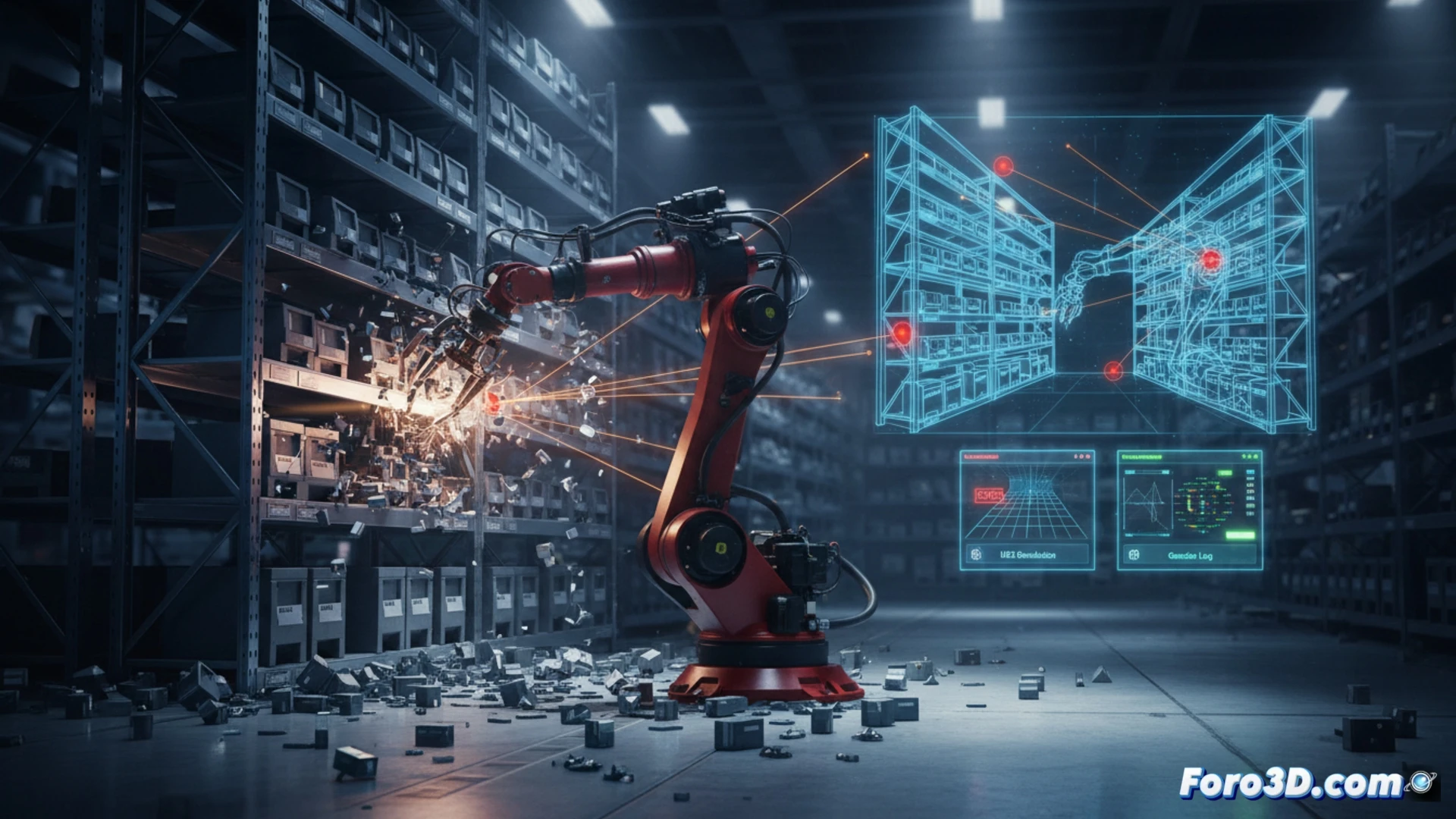
إعادة بناء جنائية باستخدام FARO Scene والتحقق في Gazebo 🛠️
كانت الخطوة الأولى هي التقاط هندسة المستودع بعد الحادث باستخدام FARO Scene، مما أدى إلى توليد سحابة نقاط عالية الدقة. تم استيراد هذه السحابة إلى Navisworks لتحليل تسلسل الانهيار الهيكلي. بعد ذلك، تم بناء توأم رقمي للروبوت والأرفف في Gazebo، مع تكرار مسارات الانتقاء الأصلية. عند محاكاة مسار LIDAR في هذه البيئة الافتراضية، تم تحديد المناطق التي يصطدم فيها شعاع الليزر بزوايا منخفضة على ألواح فولاذية مصقولة، مما أدى إلى انعكاسات فسرها المستشعر على أنها مساحة خالية. أكدت المقارنة المباشرة بين سحابة النقاط الحقيقية والمحاكاة أن هذه النقاط العمياء تتطابق تمامًا مع موقع الاصطدام.
إعادة التفكير في السلامة: من التخطيط المادي إلى المحاكاة الغامرة 🚧
يثبت الحادث أن الاعتماد فقط على أجهزة استشعار LIDAR دون التحقق من البيئة الافتراضية يمكن أن يكون خطيرًا. الانعكاس المرآوي على المعادن هو نقطة عمياء حرجة في المستودعات عالية الكثافة. كتحسين، يُقترح إعادة تصميم التخطيط بإضافة علامات منتشرة في زوايا الأرفف وإعادة وضع دعامات LIDAR لتغطية الزوايا الإشكالية. يتيح Unreal Engine 5 تصور هذه التعديلات في الوقت الفعلي، مما يوفر لمهندسي السلامة أداة غامرة لاختبار التكوينات قبل تنفيذها ماديًا، مما يقلل من خطر تأثيرات الدومينو الجديدة.
ما هي معلمات التوأم الرقمي في Unreal Engine 5 التي فشلت في التنبؤ باصطدام روبوت الانتقاء وكيف كان يمكن تجنب تأثير الدومينو في مستودع عالي الكثافة؟
(ملاحظة: في Foro3D نقوم بتحسين المسارات كما نقوم بتحسين المضلعات: حتى يقول الكمبيوتر كفى)