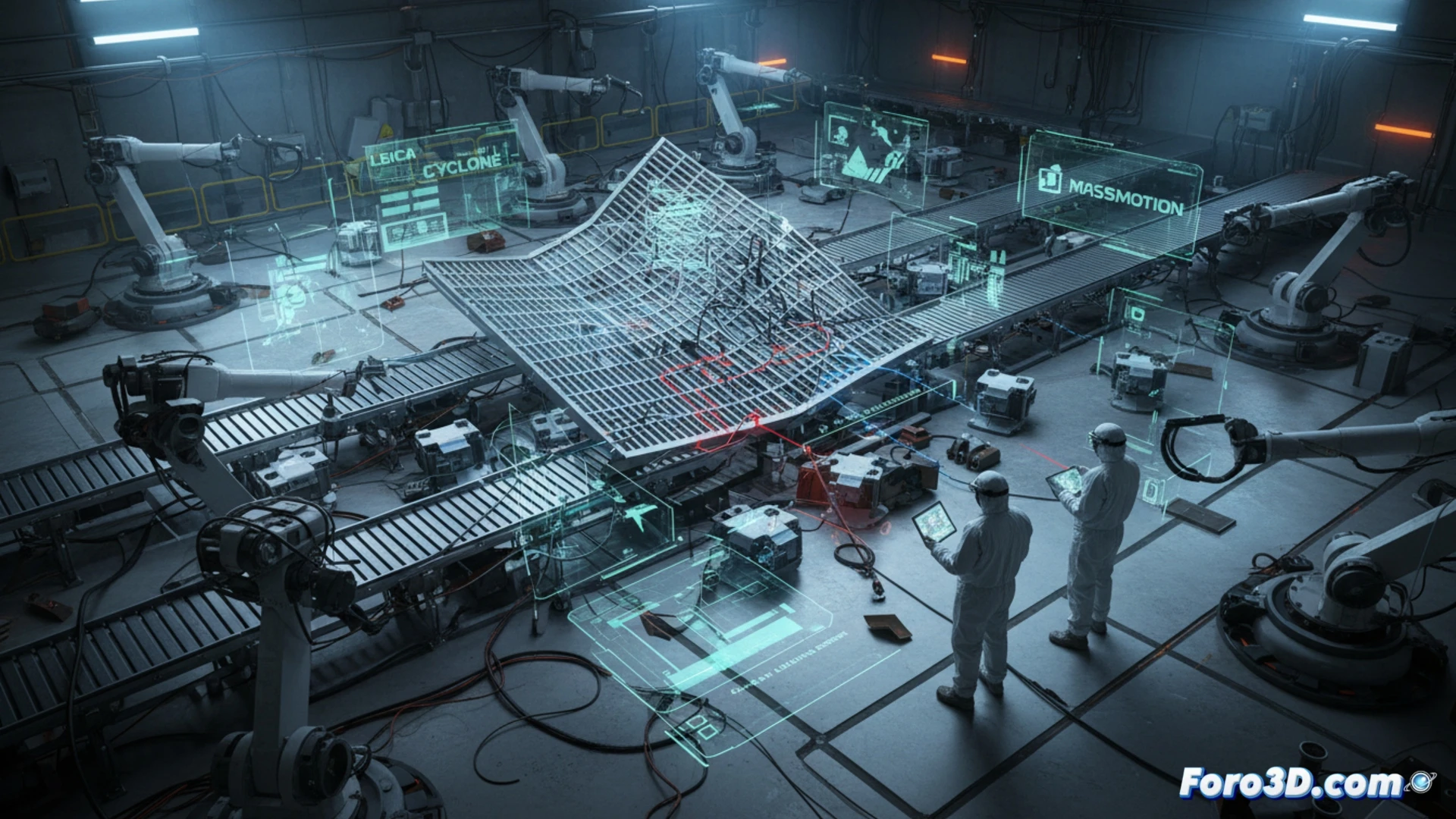
في الشهر الماضي، تعرض مستودع آلي عالي الكثافة لتوقف كامل للإنتاج عندما توقف أكثر من 200 روبوت عن العمل في تأثير دومينو. كان السبب الظاهر ازدحامًا هائلًا في شبكة الألمنيوم (grid). لتحديد ما إذا كان خطأ في التسوية بمقدار 2 مليمتر فقط هو الذي تسبب في الانهيار، لجأ فريق الخبرة الصناعية إلى ثلاث أدوات رئيسية: Leica Cyclone لالتقاط سحابات النقاط، وNavisworks لكشف التداخلات، وMassMotion لمحاكاة حركة مرور الروبوتات.
تحليل جنائي لتشوه الشبكة باستخدام Cyclone وNavisworks 🔍
كانت الخطوة الأولى في الخبرة هي مسح كامل الهيكل المعدني باستخدام ماسح ليزري Leica. تم استيراد سحابة النقاط الناتجة إلى Autodesk Navisworks، حيث تم تراكبها مع نموذج CAD الأصلي. كشف التباين عن هبوط تدريجي في منطقة التحميل، حيث أظهرت الشبكة انحرافًا قدره 3.2 ملم عن المستوى الأفقي. كان هذا الخطأ، رغم كونه مليمتريًا، كافيًا لفقدان عجلات الروبوتات (المصممة بتفاوتات قدرها 1 ملم) لقوة الجر. أكد تحليل كشف التداخل (clash detection) في Navisworks أن التآكل غير المتماثل للقضبان تسبب في انحراف الروبوتات عن مسارها، مما أدى إلى تصادم جانبي وتسبب في الازدحام المتسلسل.
محاكاة تنبؤية باستخدام MassMotion: دروس لتصميم المستودعات 🤖
لم تسعَ الخبرة إلى تحديد السبب فحسب، بل إلى الوقاية أيضًا. باستخدام MassMotion، أعاد المهندسون إنشاء تدفق الروبوتات في ظل حالة الشبكة المشوهة. أظهرت المحاكاة أنه حتى مع ميل قدره 0.1 درجة، فشل نظام الملاحة الشبكي في حساب مسارات الطوارئ. الدرس التقني واضح: في المستودعات من نوع AutoStore، يجب مراقبة تسوية الأرضية في الوقت الفعلي باستخدام أجهزة استشعار ثلاثية الأبعاد. أي انحراف مليمتري، غير محسوس للعين البشرية، يمكن أن يؤدي إلى انهيار لوجستي يوقف سلسلة التوريد لساعات.
ما منهجية المسح ثلاثي الأبعاد والتحليل الهيكلي التي ستطبقها لخبرة تشوه شبكة الألمنيوم وتحديد ما إذا كان الانهيار ناتجًا عن إجهاد المادة أم خطأ في تصميم الحمولة الديناميكية للروبوتات؟
(ملاحظة: الاختناقات في 3D تشبه الازدحامات: تراها قادمة لكنك لا تتجنبها)