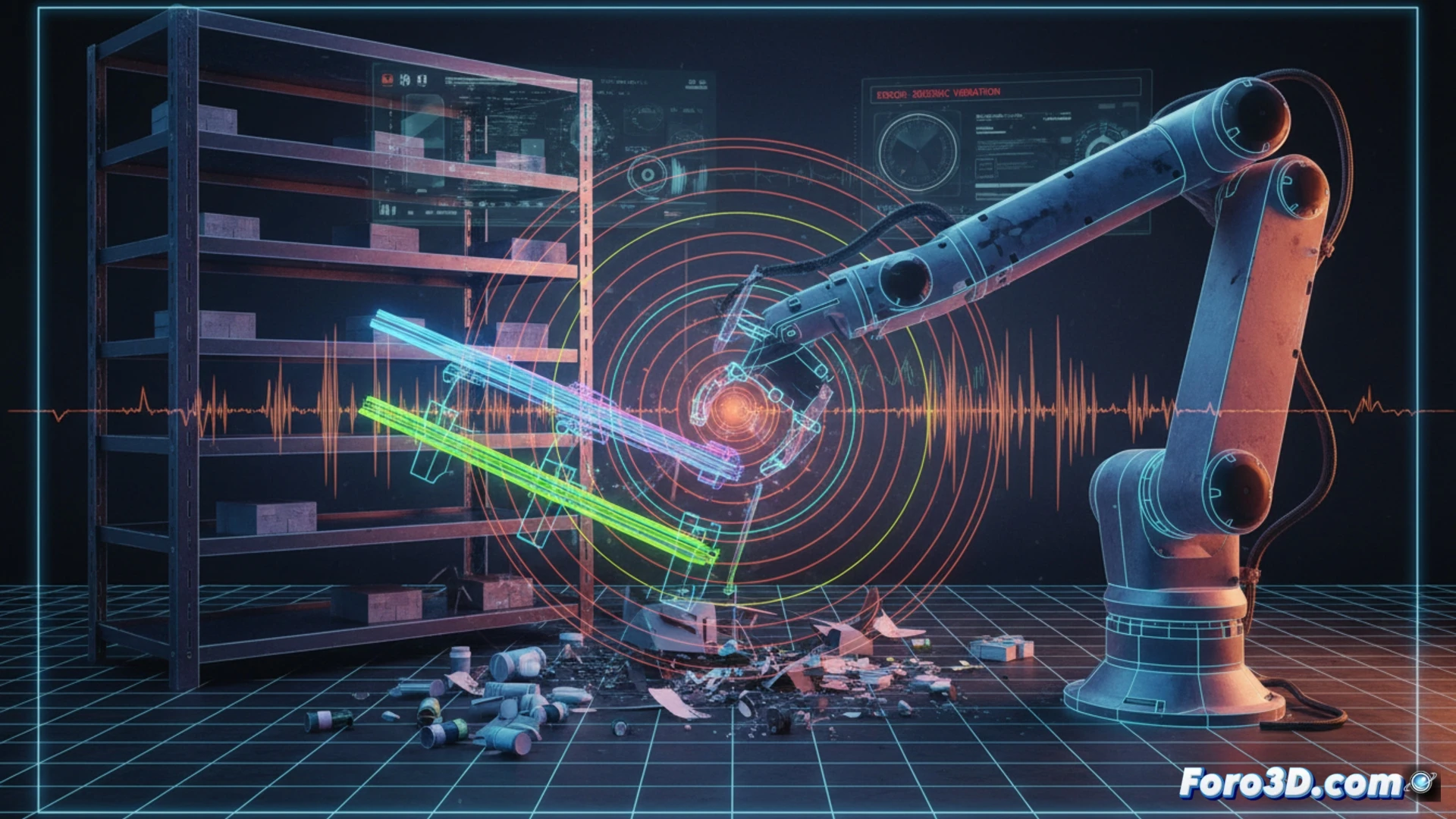
وقع الحادث في صيدلية روبوتية عالية السرعة: اصطدام الذراع الآلي بعنف بأرفف نظام التخزين الرأسي. للوهلة الأولى، بدا الأمر وكأنه خطأ برمجي، لكن فريق الصيانة اشتبه في وجود عامل خارجي. كشف التحليل ثلاثي الأبعاد عن تشوهات بمقياس المليمتر في قضبان التوجيه، ناجمة عن اهتزازات زلزالية لم تسجلها أجهزة الاستشعار القياسية للمبنى.
منهجية التفتيش باستخدام RoboGuide وRealWorks وCloudCompare 🤖
بدأ التشخيص في RoboGuide، حيث تمت محاكاة المسار الأصلي للذراع. عند مقارنته ببيانات القياس عن بعد من PLC، تم اكتشاف انحراف بمقدار 2.3 مم في المحور Z. لتأكيد السبب، تم مسح القضبان باستخدام ماسح ليزر Trimble، وتمت معالجة سحب النقاط في Trimble RealWorks. أظهرت محاذاة الأسطح انتفاخًا في القضيب الأيسر. باستخدام CloudCompare، تم إجراء مقارنة مسافات (M3C2) بين الحالة الحالية وتصميم CAD الأصلي، مما أدى إلى حساب تشوهات تصل إلى 1.8 مم في منطقة الاصطدام. تم استخدام Blender لإنشاء رسم متحرك جنائي يربط لحظة الاهتزاز الزلزالي بمسار الطرف النهائي.
دروس لمعايرة الأنظمة الآلية ⚙️
توضح هذه الحالة أن الأنظمة الروبوتية في الصيدليات تتطلب مراقبة هيكلية تتجاوز أجهزة الاستشعار الداخلية للروبوت. يمكن للاهتزازات الزلزالية منخفضة السعة، حتى لو لم تلحق الضرر بالمبنى، أن تخل بمعايرة قضبان الدقة. يُوصى بدمج مقاييس التسارع في قاعدة الأرفف وإجراء مسوحات ثلاثية الأبعاد دورية باستخدام CloudCompare للكشف عن التشوهات دون المليمترية قبل أن تتسبب في اصطدامات. تضمن التصحيح إعادة ضبط مثبتات القضبان وإعادة معايرة الذراع في RoboGuide باستخدام خريطة جديدة لتعويض الأخطاء.
ما مدى موثوقية نموذج التحليل ثلاثي الأبعاد للاصطدام في التنبؤ بمسارات ذراع آلي صيدلاني عند مواجهة اهتزازات زلزالية لم تُنمذج مبدئيًا في بيئة الصيدلية الروبوتية
(ملاحظة: محاكاة الروبوتات ممتعة، حتى يقرروا عدم اتباع أوامرك.)