Un caso reciente en una línea de automoción ha puesto el foco en la precisión milimétrica de los robots de soldadura. El sabotaje consistió en desfasar un sensor inductivo, alterando la trayectoria programada. Para documentar y analizar el fallo, se utilizó GOM Inspect para la inspección 3D y Blender para la visualización del desvío.
Análisis del desfase con GOM Inspect y Blender 🔧
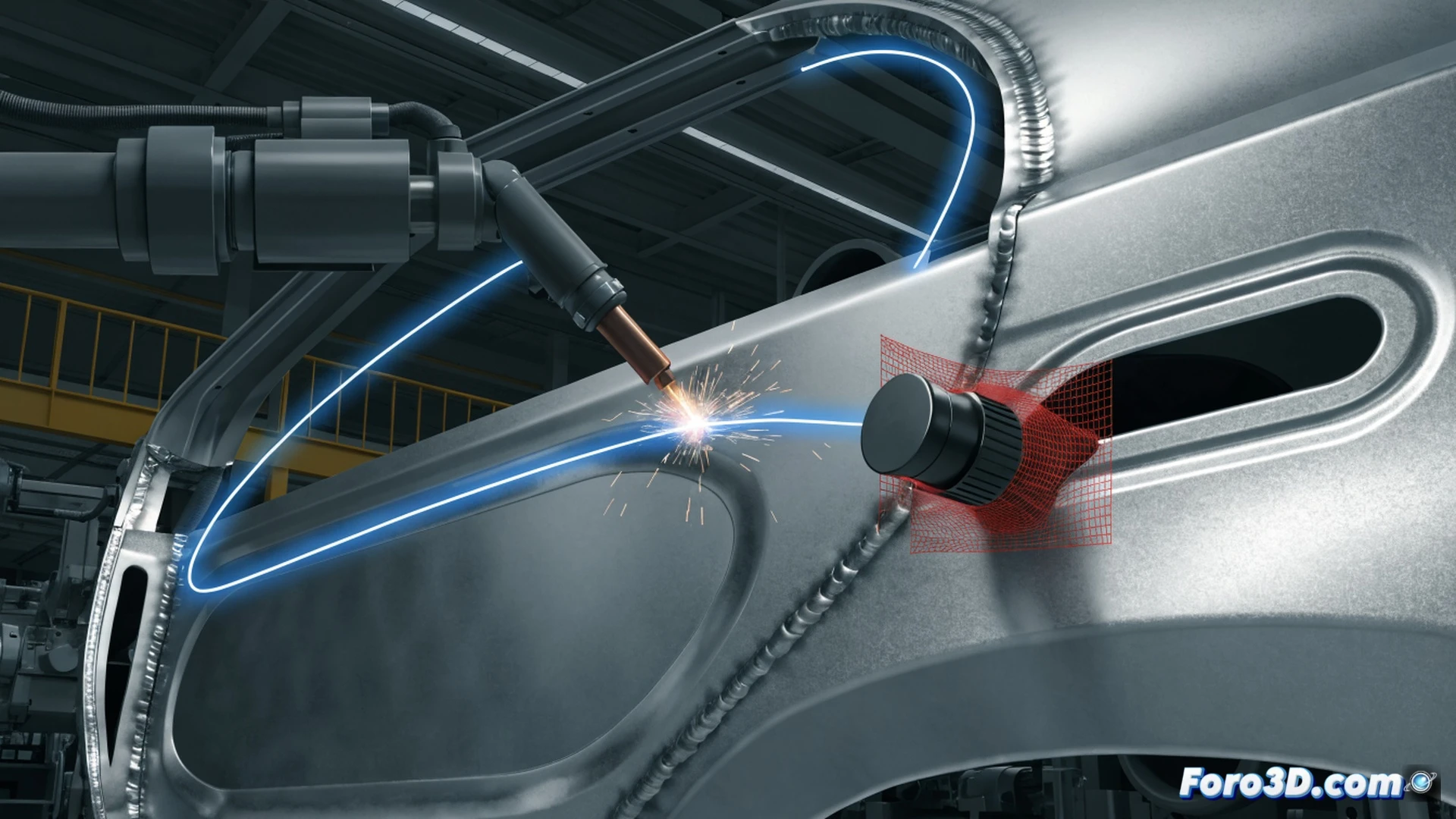
El equipo de metrología empleó GOM Inspect para capturar la nube de puntos del robot y compararla con el modelo CAD original. El desfase del sensor inductivo, de apenas 0.3 mm, provocó una desviación acumulada de 2.1 mm en la soldadura. Con Blender, se recreó la trayectoria errónea, superponiendo el recorrido real sobre el teórico. La animación permitió identificar el punto exacto donde el robot perdía la referencia.
El sensor que decidió hacer la guerra por su cuenta 🤖
Lo más curioso del caso es que el sensor no se movió solo; alguien le dio un pequeño empujón con un calibre. El robot, fiel a su programación, siguió soldando como si nada, pero desviado. Los operarios notaron las juntas torcidas antes de que el supervisor pidiera el café. Al final, el culpable fue el sensor, que no se pudo defender. GOM Inspect y Blender lo atraparon.