Un caso de sabotaje técnico ha sido detectado en una línea de empacado de alimentos. El brazo robótico, responsable de manipular productos con precisión, fue descalibrado mediante la introducción de microcuñas mecánicas en el sensor de fuerza. Este método, simple pero efectivo, alteró las lecturas del sistema y provocó errores en la colocación de los paquetes. El incidente obligó a detener la producción y a realizar un análisis forense digital para identificar el origen del problema.
Reconstrucción 3D del sabotaje con ContextCapture y Blender 🛠️
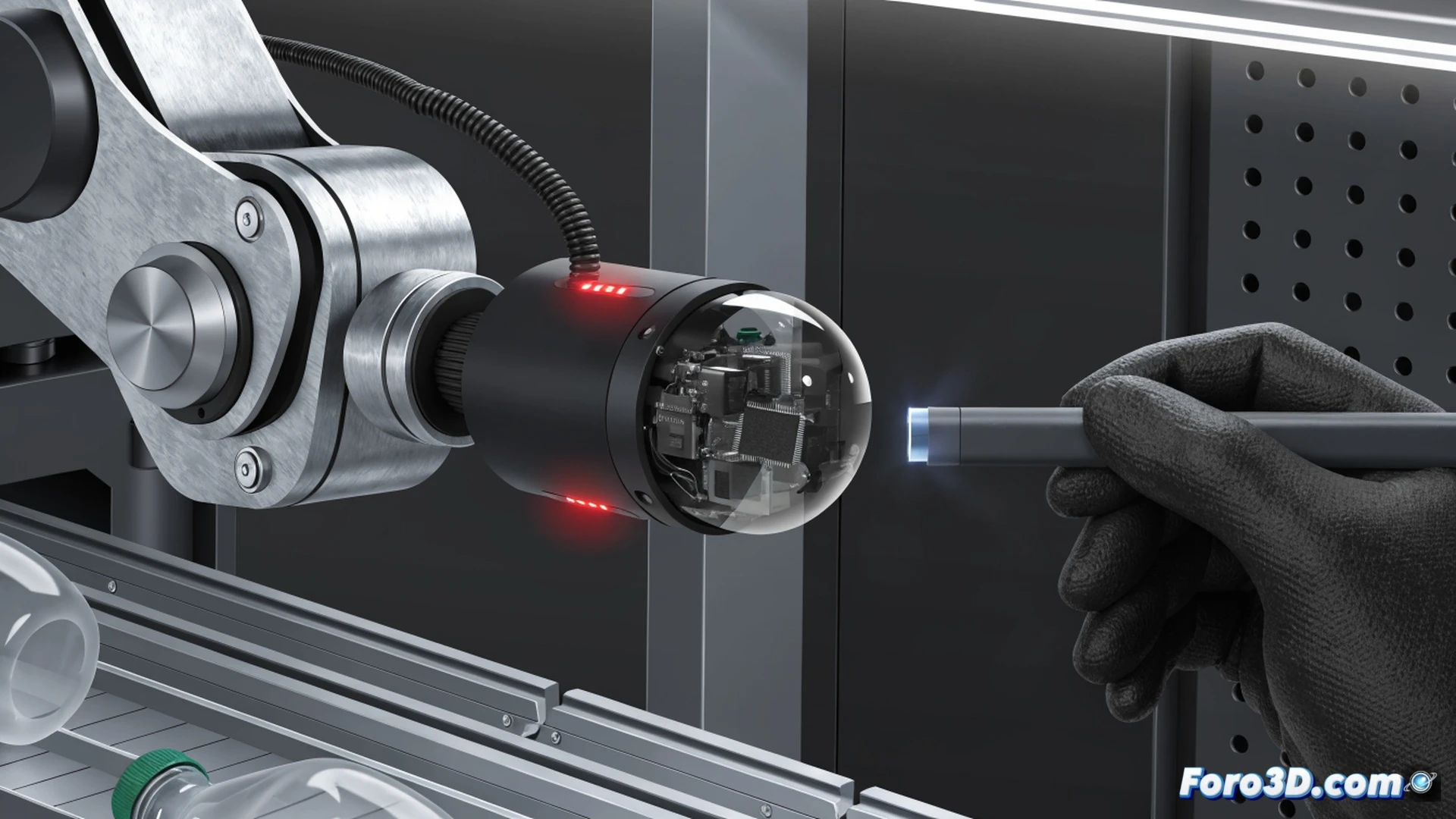
El equipo de investigación forense utilizó ContextCapture para generar un modelo 3D de alta precisión del área del sensor y las microcuñas. Este modelo permitió analizar la geometría de las cuñas y su interferencia en el sensor de fuerza. Con Blender, se simuló el comportamiento del brazo robótico bajo las nuevas condiciones mecánicas. La simulación confirmó que las microcuñas alteraban la lectura de fuerza en un rango de 2 a 5 newtons, suficiente para descalibrar el sistema sin generar alarmas inmediatas.
El sabotaje que un sensor no vio venir 🤖
Resulta que el enemigo del robot no era un hacker con código malicioso, sino alguien con un juego de cuñas y paciencia. El sensor, diseñado para detectar sobrecargas, no estaba preparado para un ataque tan sencillo. Ahora, los ingenieros evalúan si blindar el sensor o simplemente ponerle un cartel que diga: no aceptamos cuñas. La moraleja: a veces, lo más simple es lo que duele más.