Un reciente incidente en una línea de empaque farmacéutica ha revelado una técnica de sabotaje tan elegante como perturbadora: la manipulación del sensor óptico de posición mediante luz infrarroja modulada externa. El ataque, que provocó fallos intermitentes en el brazo empacador, fue detectado gracias a una reconstrucción 3D del entorno. El pipeline forense combinó ContextCapture para la nube de puntos del área y Blender para el modelo de propagación lumínica.
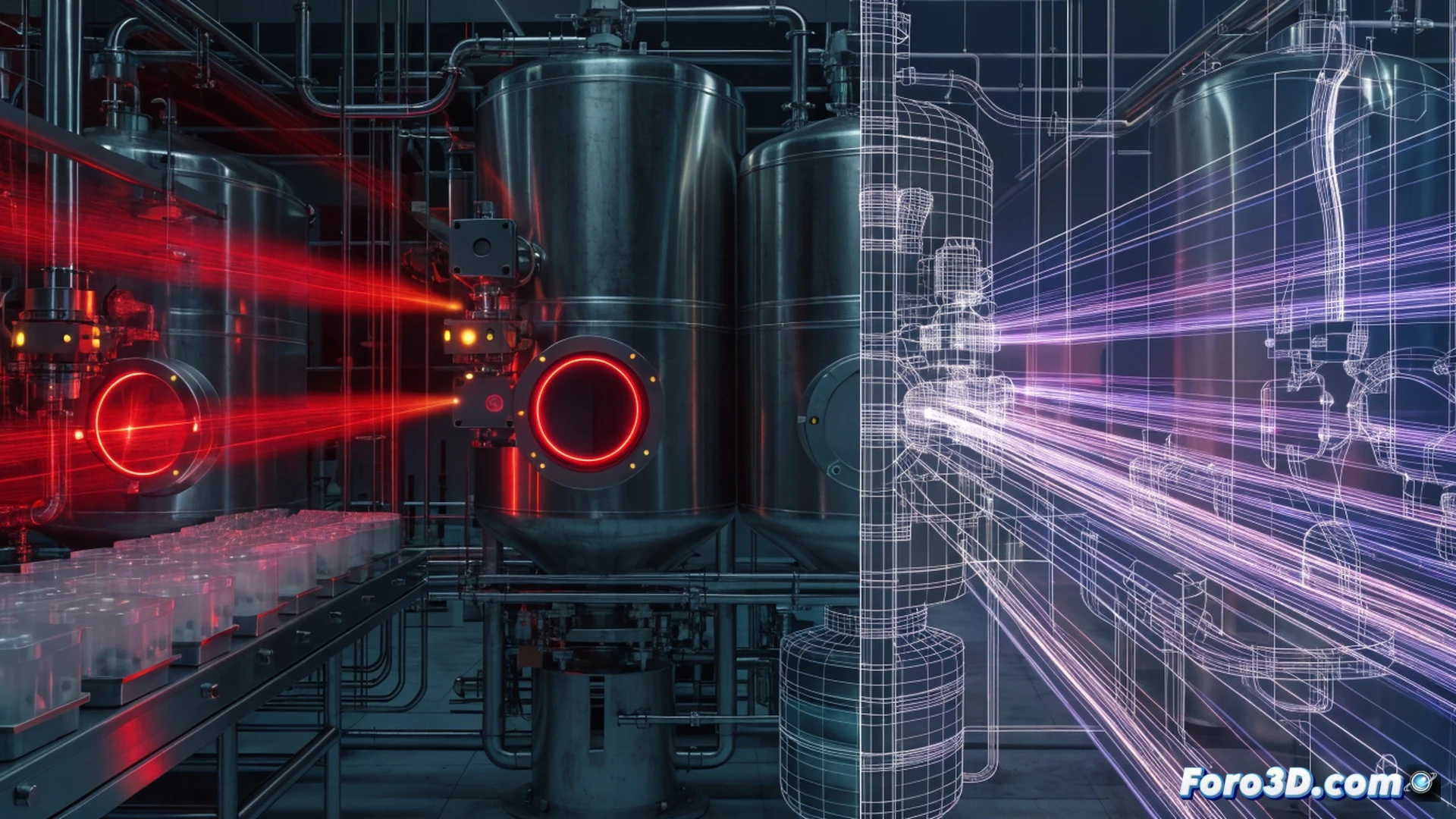
Reconstrucción del vector de ataque óptico con ContextCapture y Blender 🔦
El equipo de seguridad primero realizó un escaneo con ContextCapture del brazo y la zona del sensor, generando un modelo geométrico de alta precisión. Este modelo se importó a Blender, donde se simuló la trayectoria de la luz IR modulada desde una fuente externa oculta en el techo. Se calculó la intensidad en el receptor del sensor para distintos ángulos, identificando la ventana exacta de modulación que engañaba al sistema de control. La animación resultante mostró cómo un pulso de 38 kHz cegaba el sensor justo al iniciar el ciclo de empaque.
El fantasma de la óptica: cuando el sensor ve lo que no hay 😂
Lo más cómico del caso es que el atacante usó un mando a distancia de tele para hacer parpadear al brazo robótico como si fuera un camarero con hipo. Los técnicos, durante dos semanas, culparon al firmware, a la humedad y hasta al café de la máquina. Al final, el culpable era un emisor IR de 3 euros pegado con chicle en el falso techo. La lección: a veces lo que ve el sensor no es un error, es un ingeniero aburrido con un mando universal.