Un sabotaje industrial ha sido detectado en una línea de montaje de motores. El responsable modificó el par de apriete real del robot de atornillado de culatas mediante un decalaje deliberado del transductor electrónico, provocando fallos estructurales. Para documentar las evidencias y reconstruir la geometría de las piezas afectadas, se empleó un pipeline 3D con GOM Inspect y Blender, permitiendo contrastar las desviaciones dimensionales con los registros de producción.
Pipeline 3D para la detección de desviaciones en el apriete 🔧
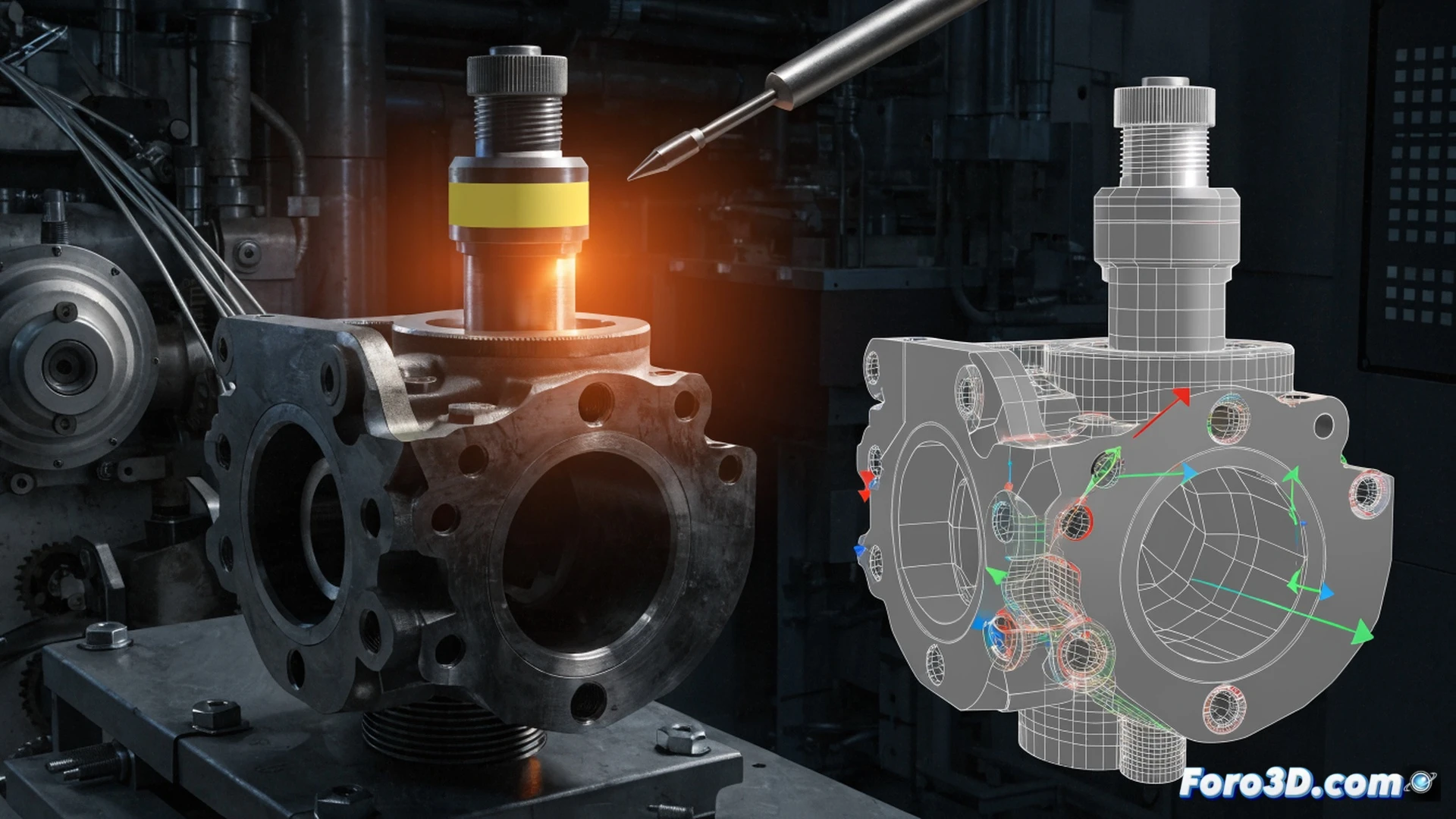
El proceso comenzó con GOM Inspect para escanear las culatas y los tornillos, generando nubes de puntos que se alinearon con el modelo CAD original. Se identificaron deformaciones plásticas en las arandelas y una elongación anómala en los vástagos roscados. Con Blender, se realizó una animación forense que simulaba la secuencia de apriete real frente a la programada. Los datos del transductor falseado mostraban un desfase de 12 Nm, suficiente para comprometer la junta de culata sin activar las alarmas de calidad.
El sabotaje que ningún sensor quiso ver 🕵️
Lo curioso del caso es que el transductor no fue dañado, sino desplazado 2 milímetros mediante una simple cuña de plástico. El robot apretaba feliz, creyendo que daba el par exacto, mientras las culatas sufrían un masaje ilegal. Los técnicos tardaron tres semanas en descubrir el truco, porque el sistema de calibración solo revisaba la electrónica, no la posición física del sensor. Al final, el culpable confesó: quería generar horas extra de reparación. Eso sí, su plan era de traca.