Analizamos en 3D el perfil técnico de Josh Hazlewood, el lanzador australiano que combina altura, ritmo y una línea implacable. Su acción repetitiva y su capacidad para generar bounce desde el cuarto de largo lo convierten en un activo táctico en cualquier superficie. Este artículo desglosa sus características especiales desde la perspectiva de la biomecánica y la tecnología deportiva.
El modelo 3D de su acción: palanca y punto de liberación 🏏
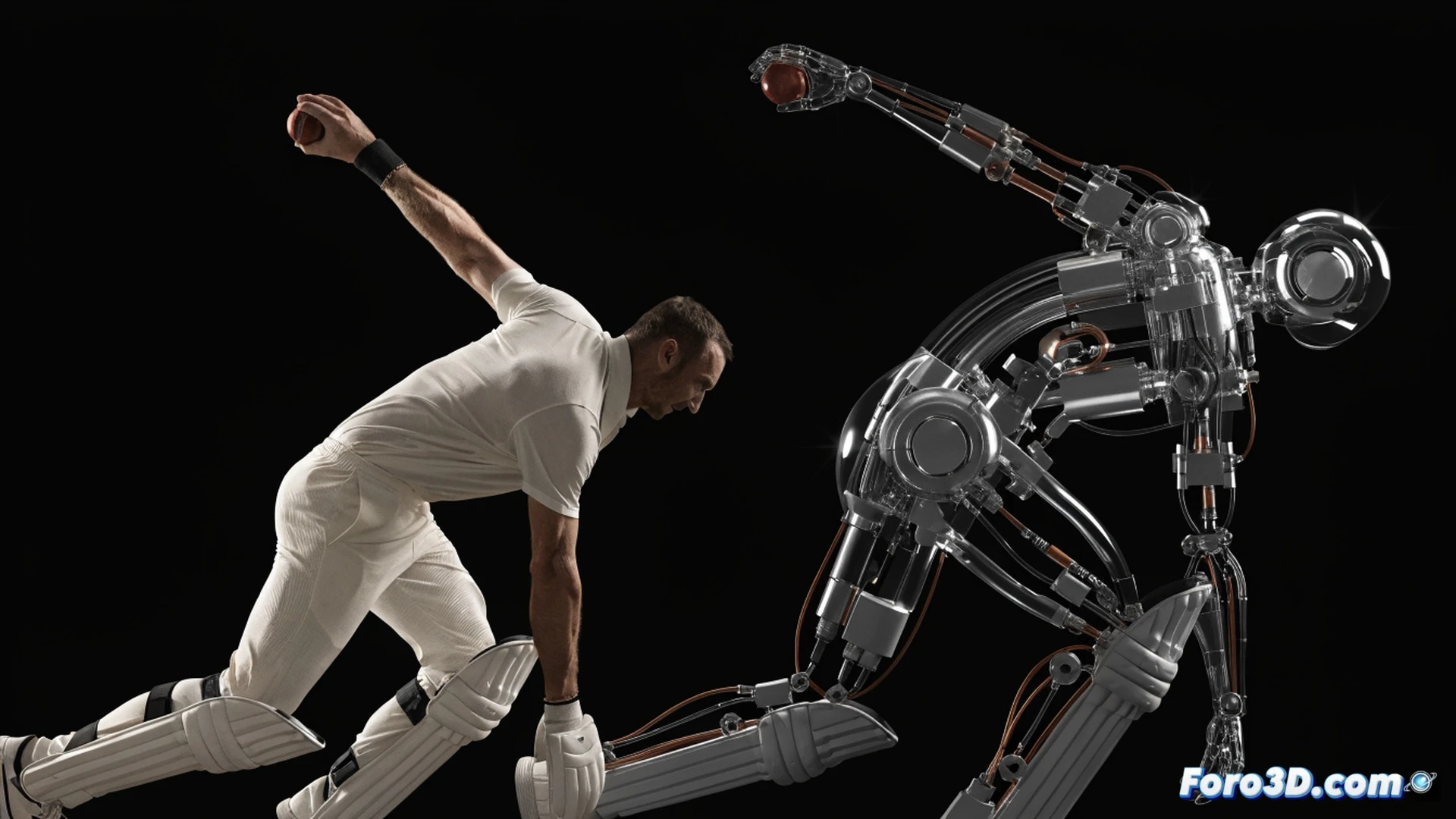
La reconstrucción en 3D revela que Hazlewood utiliza una extensión completa del brazo no lanzador para maximizar la rotación del torso. Su punto de liberación es alto, cercano a los 2.1 metros, lo que genera un ángulo de descenso pronunciado. La muñeca se mantiene firme y recta, minimizando la desviación lateral no deseada. Estudios de captura de movimiento indican que su pie de apoyo aterriza consistentemente en el mismo punto del lanzamiento, con una desviación de apenas 5 centímetros. Esta repetitividad es la base de su precisión.
El GPS del lanzador: cómo no se pierde ni en un desierto 🎯
Si le pones un GPS a Hazlewood, los mapas de calor mostrarían que su zona de lanzamiento es más aburrida que un documental de hormigas. El tipo tiene la misma variación de línea que una regla de acero. Mientras otros lanzadores prueban ángulos imposibles, él se limita a clavar la bola en el cuarto de largo y esperar a que el bateador cometa un error. Es como ver a un robot con pinta de granjero que cobra por hacer siempre lo mismo. Eso sí, funciona.