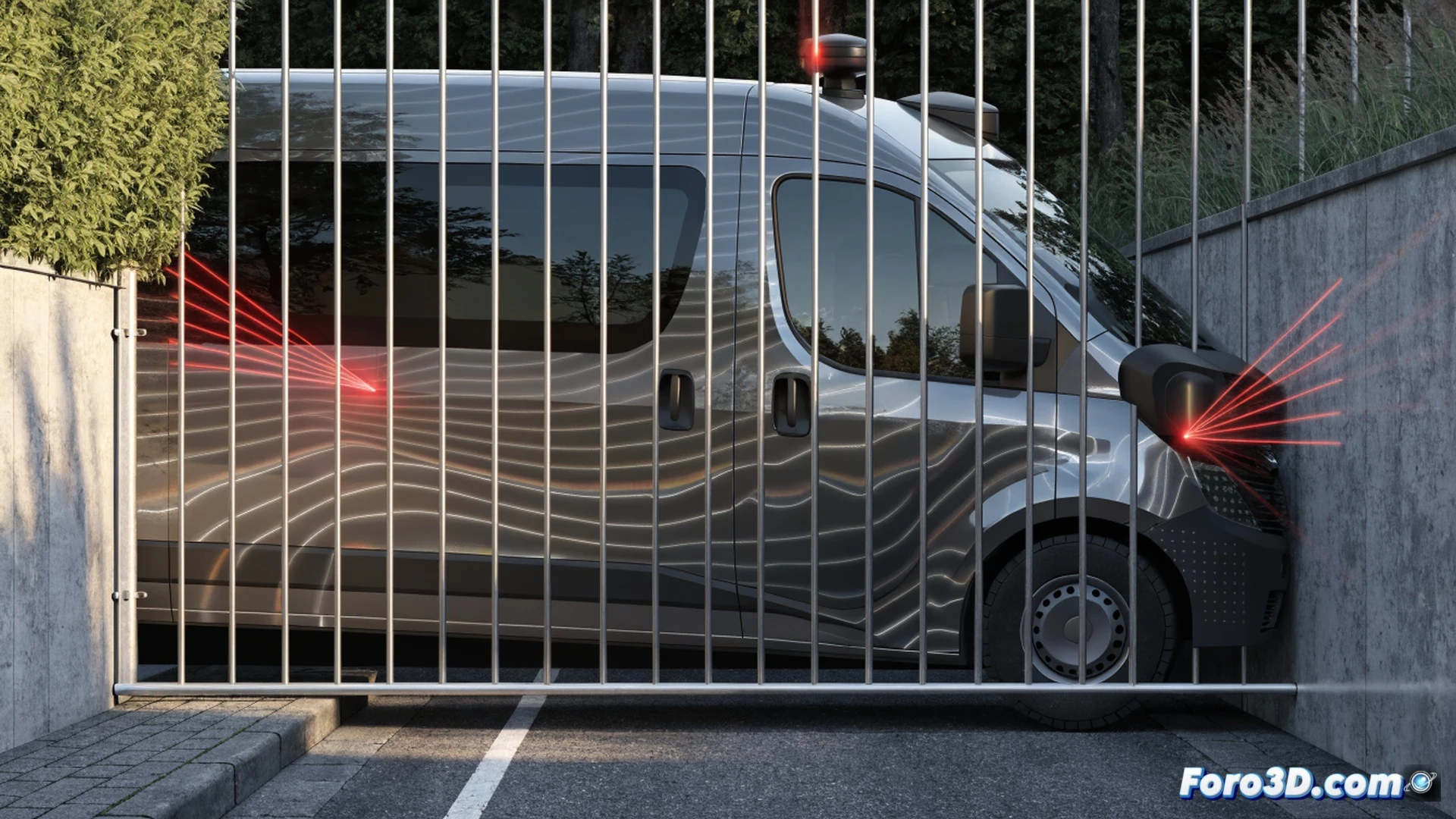
Una furgoneta de reparto autónoma colisionó contra una valla metálica tras fallar su sistema de triangulación LiDAR. La causa: una capa de pintura antirreflectante aplicada sobre la superficie, que absorbió los pulsos láser y cegó al sensor. El incidente, registrado durante pruebas en un entorno controlado, revela una vulnerabilidad crítica en los vehículos autónomos cuando se enfrentan a materiales no convencionales.
Pipeline 3D: de RealityCapture a Carla Simulator para recrear el fallo 🚧
El equipo forense digital empleó RealityCapture para generar un modelo 3D detallado de la escena, incluyendo la valla y la furgoneta. Este modelo se importó a Carla Simulator, donde se reprodujo la trayectoria del vehículo. Al simular la misma pintura antirreflectante en el entorno virtual, se confirmó que el LiDAR no detectaba la superficie, generando puntos nulos en la nube de puntos. El error de triangulación se produjo al no existir datos suficientes para calcular la distancia, llevando al sistema de navegación a ignorar el obstáculo.
El camuflaje perfecto: la furgoneta que no vio la valla 🚐
Resulta que el punto ciego de los coches autónomos no es un peatón distraído, sino una capa de pintura. La furgoneta, en su empeño por repartir paquetes, se encontró con un obstáculo invisible para sus ojos láser. Ahora los ingenieros buscan una pintura que engañe al LiDAR pero que no sea tan efectiva. Mientras tanto, recomendamos no pintar las vallas con ese material si quieres que tu reparto llegue a destino.