Un sabotaje técnico en una línea de montaje de motores ha sido descubierto tras fallos recurrentes en culatas. La manipulación consistió en un decalaje de 0.2 mm en el sensor analógico de par del robot atornillador. Este ajuste provocaba que el apriete real superara el especificado, generando tensiones internas en el bloque motor. El análisis forense se realizó combinando escaneo 3D con GOM Inspect y modelado en Blender para visualizar la desviación.
Reconstrucción 3D del sabotaje con GOM Inspect y Blender 🔧
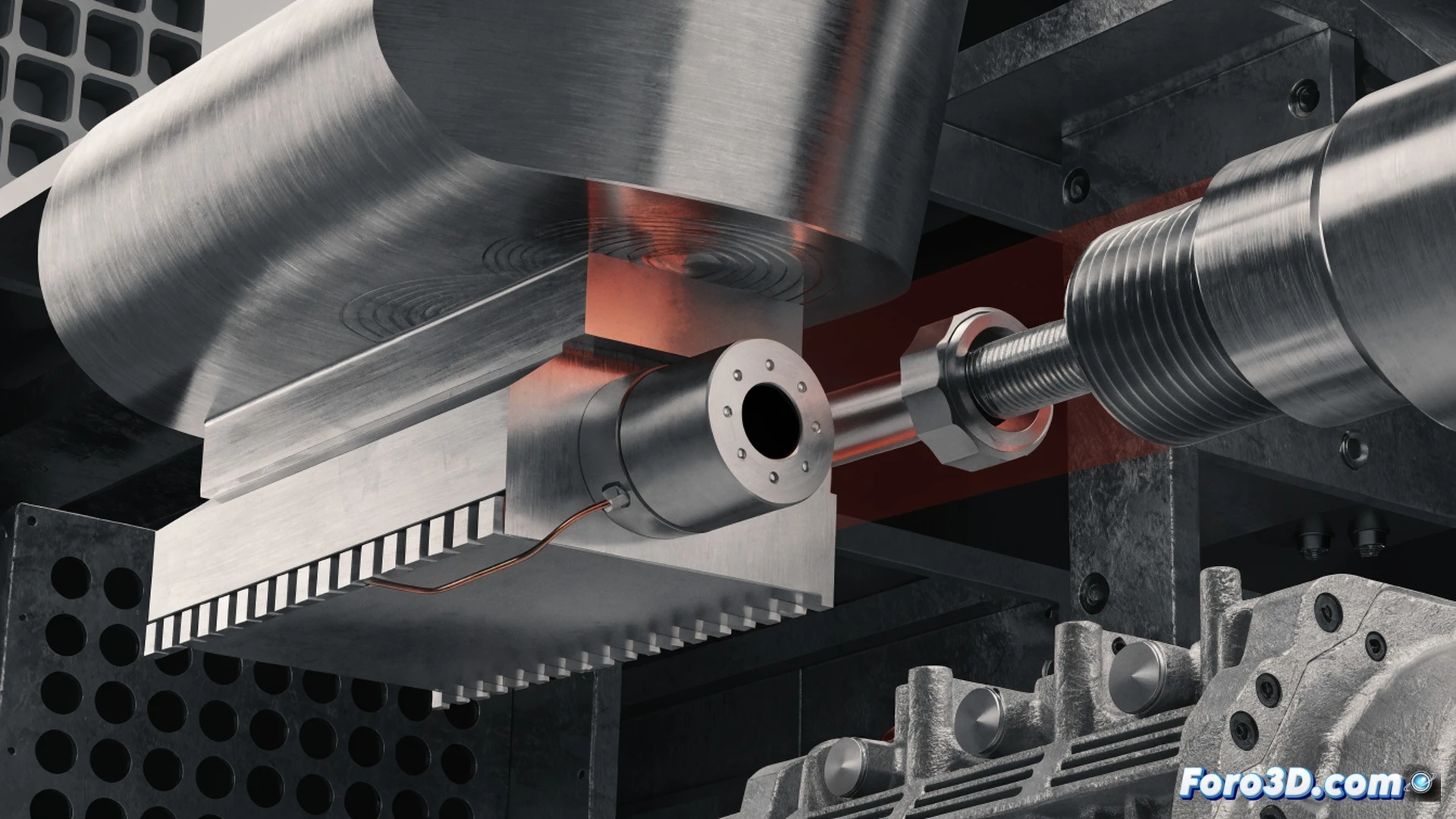
El equipo de calidad utilizó GOM Inspect para comparar la nube de puntos del robot atornillador con su modelo CAD original. La desviación detectada en el sensor analógico era imperceptible a simple vista. Con Blender, se recreó la cinemática del brazo robótico y se simuló el efecto del decalaje en el par de apriete. La conclusión fue clara: la alteración milimétrica generaba un sobreapriete del 12% en cada culata, comprometiendo la integridad del motor sin dejar marcas visibles en las piezas.
El sensor que quería apretar tornillos con sentimiento 🤖
Alguien decidió que el robot necesitaba un toque de personalidad y le ajustó el sensor para que apretara con más emoción. Lástima que esa emoción era la de un mecánico enfadado un lunes por la mañana. El sabotaje se descubrió porque un operario notó que las tuercas sonaban diferente al ritmo de la cinta transportadora. Ahora el robot ha sido recalibrado y, de paso, se le ha puesto un cartelito que dice: No tocar, ni para hacerle cosquillas 😅