Un sabotaje técnico ha descalibrado el sensor de inducción de un robot clasificador de chatarra mediante un campo magnético alterno oculto. El incidente, detectado tras fallos en la separación de metales, requirió un análisis forense digital para identificar la interferencia externa. Se emplearon ContextCapture y Blender para reconstruir en 3D la escena y localizar el origen del campo.
Reconstrucción 3D del ataque con ContextCapture y Blender 🛠️
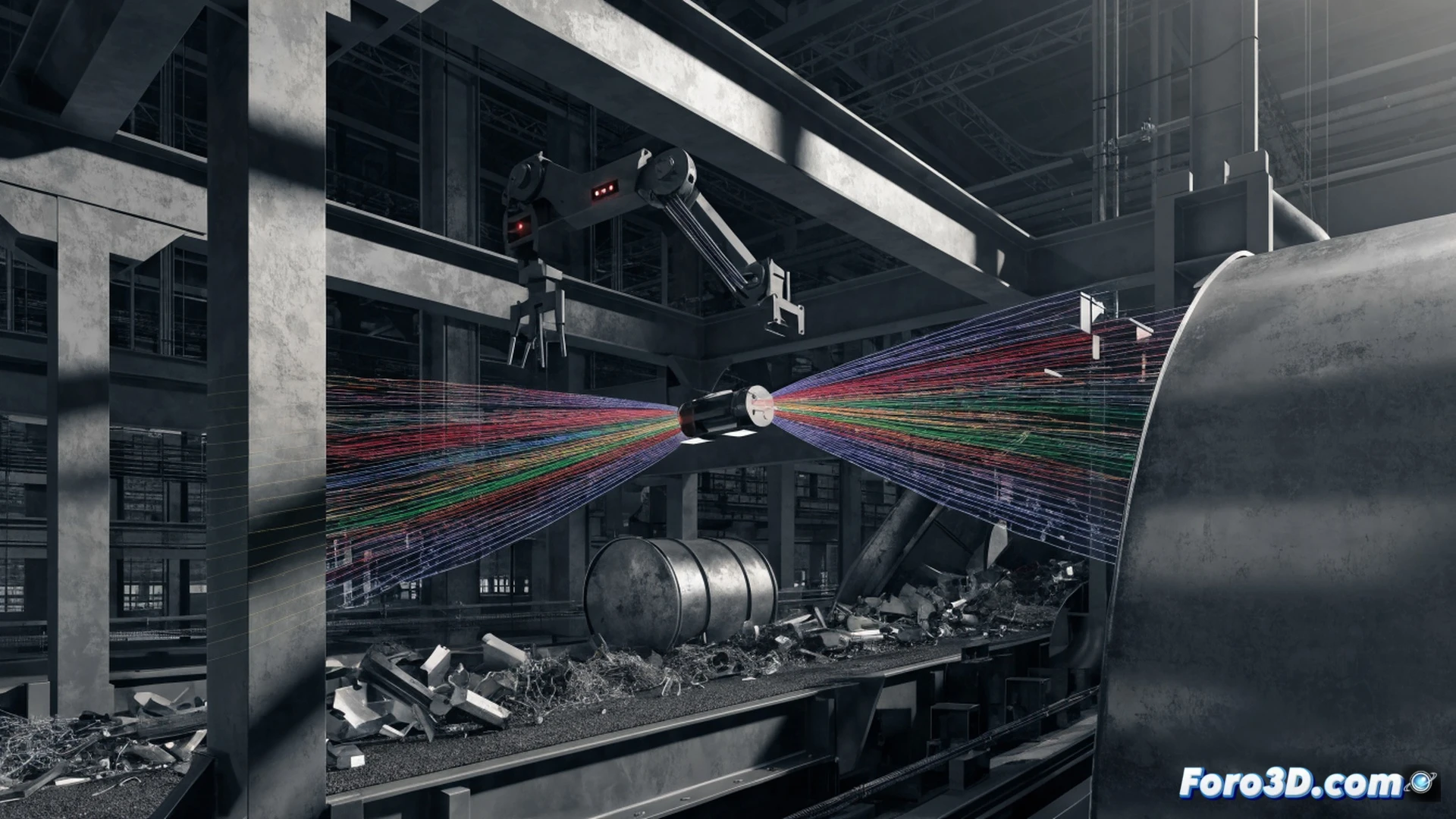
El pipeline forense comenzó con ContextCapture, generando una nube de puntos y un modelo 3D de la zona del clasificador a partir de fotografías del lugar. Este modelo se importó a Blender para simular las líneas de campo magnético y su efecto sobre el sensor. La animación permitió visualizar cómo un imán alterno, oculto en la estructura metálica adyacente, desviaba la lectura del sensor, provocando la clasificación errónea de materiales no ferrosos como chatarra férrica.
El imán rebelde y su plan para la confusión metálica 🧲
El culpable, un pequeño imán de corriente alterna, casi logra su objetivo: volver loco al robot clasificador. Durante días, el sistema confundió latas de aluminio con vigas de acero, causando más de un dolor de cabeza en el área de reciclaje. Al final, el saboteador magnético fue descubierto y desactivado, aunque algunos operarios aseguran que, desde entonces, el robot mira con recelo cualquier objeto metálico que se le acerque.