Un equipo de Huawei, la Universidad Técnica de Darmstadt y ETH Zürich presenta ROS-LLM, un framework de código abierto que actúa como puente entre modelos de lenguaje avanzados y el sistema operativo de robots (ROS). Publicado en Nature Machine Intelligence, permite dar órdenes a un robot en lenguaje natural, como recoge la taza azul, y que este ejecute la acción física correspondiente sin necesidad de programación específica por parte del usuario. 🤖
Cómo funciona el framework: de la instrucción a la acción ejecutable ⚙️
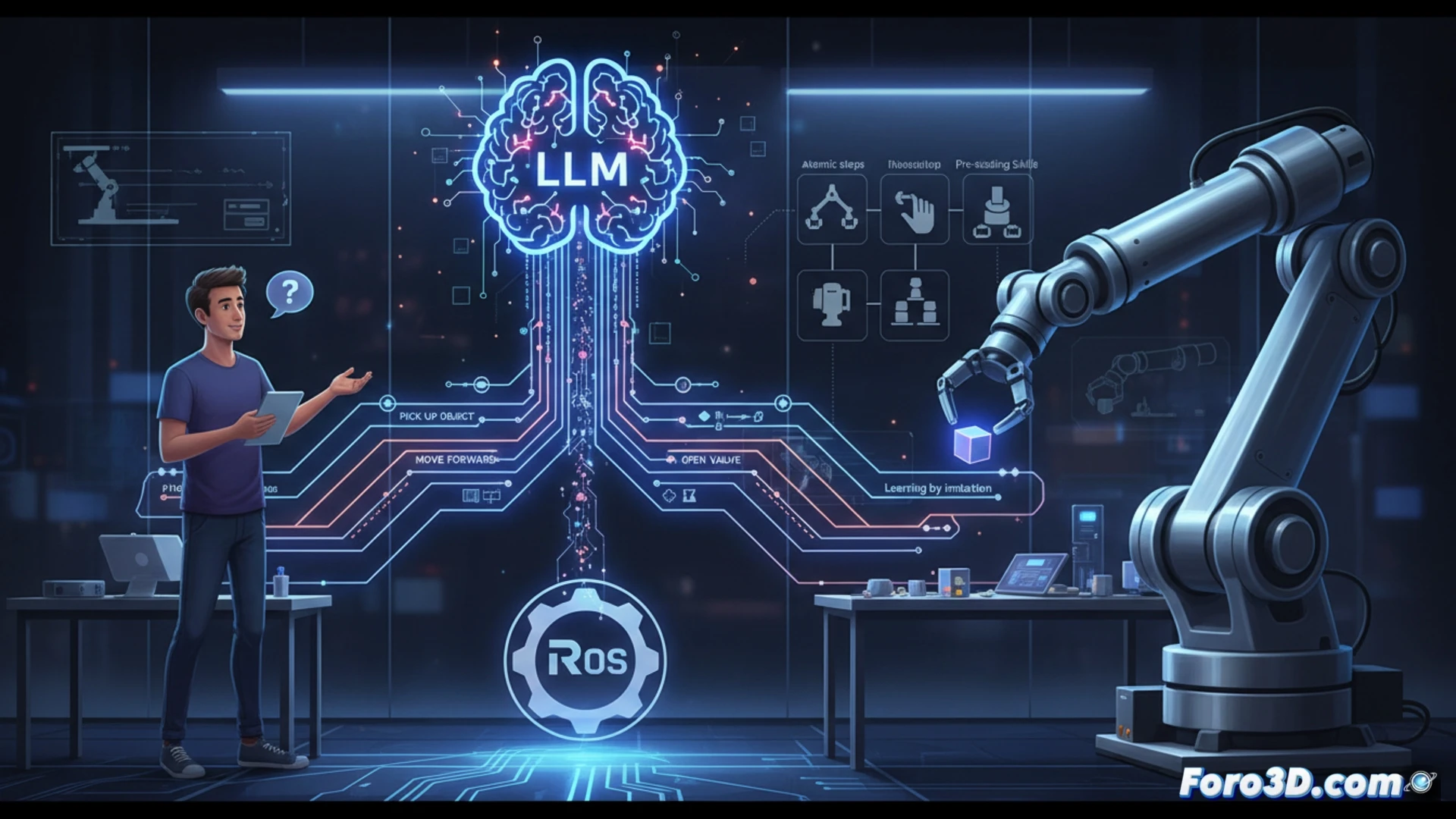
ROS-LLM recibe una tarea en lenguaje natural y la descompone en una secuencia de pasos atómicos que el robot puede entender. Consulta una base de conocimientos de habilidades preprogramadas por expertos y genera el código de planificación y ejecución compatible con ROS. El sistema soporta modos de ejecución directa, paso a paso o por confirmación, y puede aprender nuevas secuencias por demostración, combinando habilidades base para resolver tareas no previstas.
Adiós a los manuales, hola a los malentendidos literales 😅
La promesa es clara: ya no necesitarás aprender a programar un brazo robótico. Solo dile lo que quieres. Eso sí, habrá que ser extremadamente preciso. Una orden como limpia un poco este desorden podría terminar con el robot archivando ese informe importante que estaba desordenado sobre la mesa, o regando la planta con café. La era de la robótica accesible también inaugura la era de las discusiones semánticas con tu asistente de hierro.